
 Mit hoz a jövő az aszinkron motorok után? Eltérő elveken működő motorokat nézünk meg.
Mit hoz a jövő az aszinkron motorok után? Eltérő elveken működő motorokat nézünk meg.
Az elektromos motorok előnyeit az előző részben már láttuk. Ahogy azt is, hogy az aszinkron motorok hatásfoka és tömege még nem az igazi. Most megnézzük, hogy miért érdemes még jobban növelni a motorok hatásfokát és ezt hogyan tudjuk megtenni. Első körben az eltérő elven működő motorokat vesszük sorra.
Az köztudott, hogy a belsőégésű motorok hatásfoka pocsék, de a sokat hangoztatott 30-40-50%-os értékek csak egy-egy üzemállapotban igazak, nem pedig a motor működése során bármikor. Tehát azok a számok az elérhető legjobb hatásfokok. Ez a villamos motorok hatásfokával is így van. Ezért most itt nézzünk két hatásfok térképet, balra egy dízelmotorról, jobbra pedig egy villanymotorról:
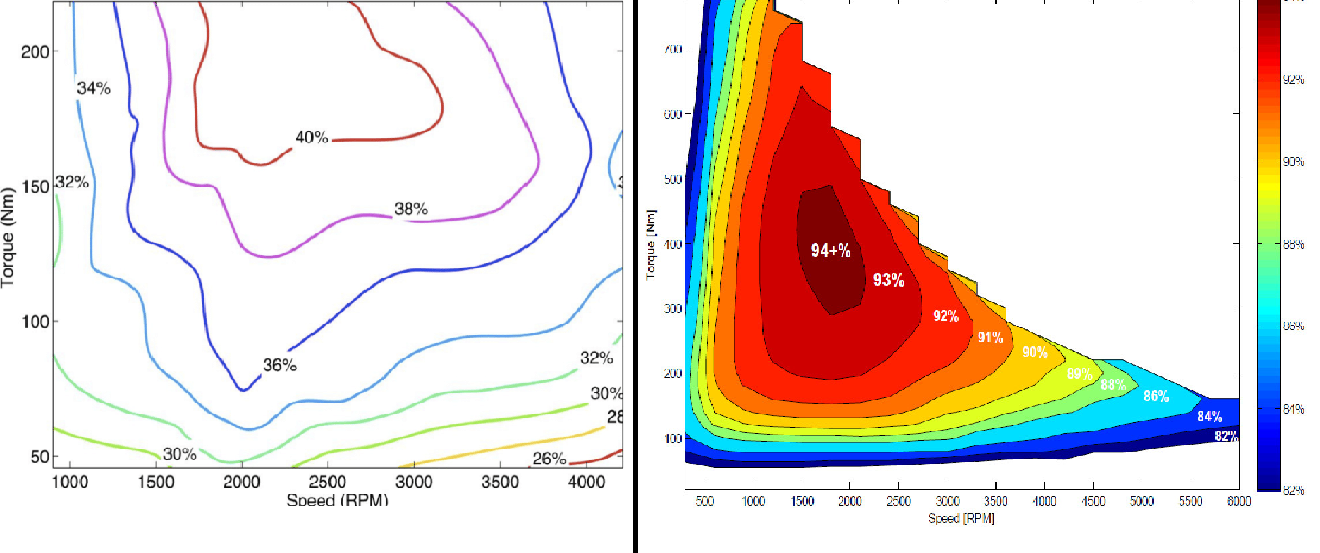
Látszik, hogy a belsőégésű motor hatásfoka részterhelésen, alacsony fordulatszámon (például városban) nagyon rossz. Nagy terheléssel, magasabb fordulatszámon, (pl. autópályán) pedig közel van a legjobbhoz. Az elektromos motoroknál már nincs ilyen nagy különbség a két üzemállapot között. Mivel a belsőégésű motor veszteségei mindig magasak, az üzemanyag energiasűrűsége pedig jó nagy, ezért a menetellenállás növekedése (pl. vizes aszfalt vagy szembeszél) alig észrevehetők a fogyasztásban. Hasonlóan a nagyobb sebességű haladáskor megnövekvő légellenállás és gördülési ellenállás is csak csekély mértékben jelentkezik.
Másképp megfogalmazva kis terheléssel annyira sokat fogyasztanak a belsőégésű motorok, hogy a menetellenállás növekedése csak egy bizonyos sebesség átlépése után válik meghatározóvá.
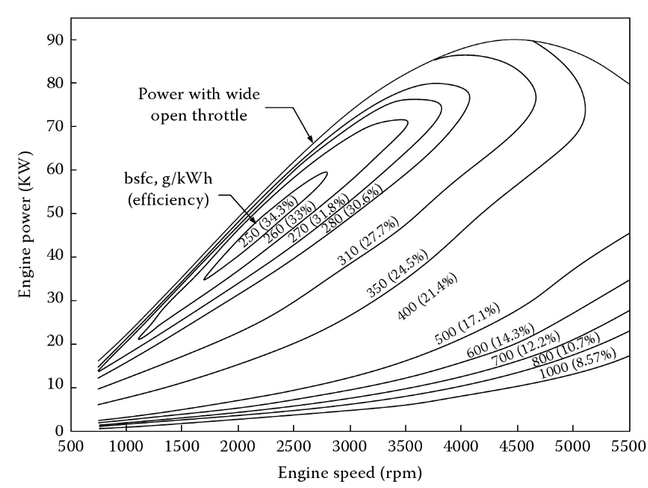 Egy belsőégésű benzinmotor hatásfoka a fordulatszám és a leadott teljesítmény függvényében (Forrás: [1])
Egy belsőégésű benzinmotor hatásfoka a fordulatszám és a leadott teljesítmény függvényében (Forrás: [1])
Az elektromos motorok sokkal jobb hatásfoka városban látszik meg, mivel hiába sokkal rosszabb az akkumulátorok energiasűrűsége a gázolajnál és a benzinnél, a nagy hatásfokú hajtáslánc miatt manapság már egészen jó az elektromos autók hatótávolsága. A nagyobb sebességen megnövekvő menetellenállások hatása észrevehető lesz a gyenge energiasűrűségű akkumulátorok miatt. Ezért városban hiába sokkal kedvezőbb az elektromos autókat használni, a nagy sebességű haladás már jóval érzékenyebben érinti a hatótávolságot. Haszonjárművek esetén a puszta tömeg, és a változatos felhasználási környezet jelent kihívást.
| Motor | Skoda 4ML3444/K4 | Skoda ML3846/K6 | Danfoss EM-PMI540-T1500 |
| Motor működési elv | Aszinkron | Aszinkron | Állandó mágnessel segített szinkron reluktancia motor |
| Névl. teljesítmény | 160 kW | 250 kW | 278 kW |
| Maximális hatásfok | ~90 % | ~93 % | 96 % |
A belsőégésű motorokhoz képest azt már látjuk, hogy jelentős előnyben vannak az elektromos motorok, van-e még jelentősége itt pár százalékkal szőrözni? Nagyon is, mivel nem biztos, hogy pár százalékról van szó, névleges pontban sem. Alacsony fordulatszámon és részterhelésen pedig még ettől is jóval nagyobb lehet a különbség az eltérő elven működő elektromos motorok között. Tehát nem csak az érdekel minket, hogy a legjobb hatásfok hány százalék, hanem hogy milyen széles fordulatszám- és terhelés tartományban áll rendelkezésre. Az eredmény pedig súlyos kilométerek az egy feltöltéssel megtehető hatótávolságban.
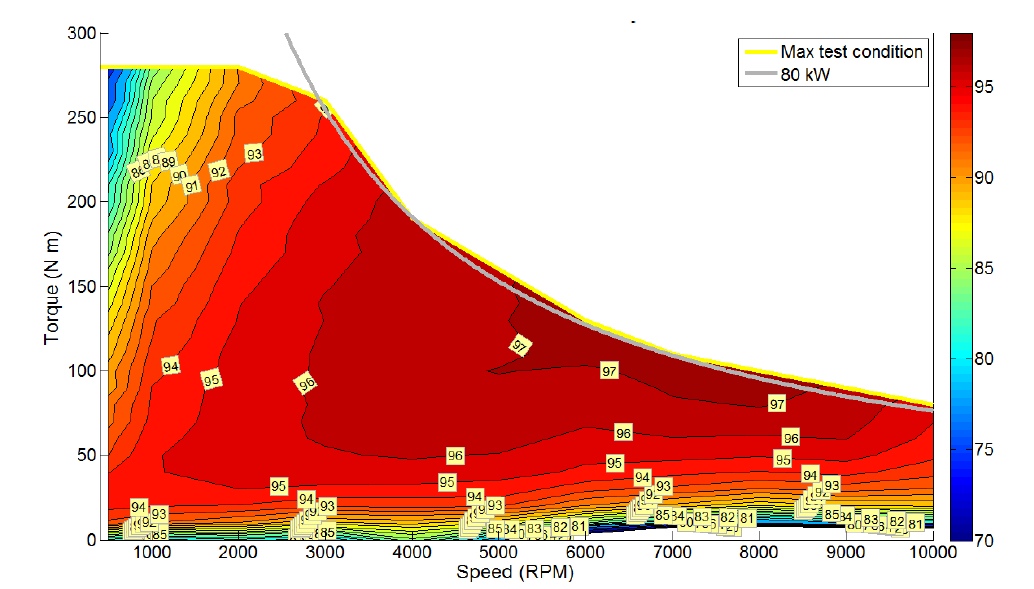 A Nissan Leaf I állandó mágneses (IPM) motorjának hatásfok térképe.[2]
A Nissan Leaf I állandó mágneses (IPM) motorjának hatásfok térképe.[2]
A másik dolog a visszatáplálás, ami miatt érdemes a hatásfokokon szőrözni. Egy hajtásrendszerben van inverterünk, motorunk, áttételünk.
Egy kiválasztott üzemi pontban 160 kW tengelyteljesítménnyel szeretnénk hajtani, mennyit kell betáplálni?
A példában inverterünk hatásfoka 97%, a motorunké 88%, a hajtóművünké 91%.
160kW/0,97/0,88/0,91= 206 kW. Ugyanígy van 160kW tengelyteljesítményünk, ebből, mennyit tudunk visszatáplálni? 160*0,91*0,88*0,97= 124kW.
Változtassunk pár dolgon! Legyen az inverter hatásfoka 98%, a motoré pedig 94%, minden más változatlan. Így hajtáshoz 191kW teljesítmény szükséges, a visszatáplálás pedig 134 kW teljesítménnyel történhet.
Ez csak egyetlen, kiragadott üzemi pontra vonatkozott, a gyorsítás és a lassítás során változik a teljesítmény igény, ahogy az adott részegységek hatásfoka is. Ezért aztán nem mindegy, hogy mi milyen hatásfokú, esetleg elhagyható-e az egyik tag a képletből. Amire érdemes figyelni, hogy egy adott motor legnagyobb hatásfoka hova esik, a tervezett felhasználási profilhoz közel-e, illetve pár küszöbértéket megszabva érdemes versenyeztetni a különféle motorokat, hogy melyik hatásfokhoz mekkora terület tartozik a hatásfok térképen. Az a jobb motor, ami a magasabb hatásfok értékeket szélesebb nyomaték- és fordulatszám tartományban tudja biztosítani.
Állandó mágneses (PM) motorok
Az állandó mágneses motorok szinkron motorok. A gerjesztést nem kívülről visszük a forgórészre csúszógyűrűk segítségével, mint az erőművekben használt szinkron generátorok esetén, hanem a forgórészen(/ben) elhelyezett állandó mágnesek biztosítják. Az állórészük akár azonos is lehet egy aszinkron motoréval, a forgórészben van a fő különbség. Míg az aszinkron gépünk forgórészében egy vezetőben folyó áram hatására jön létre a forgást előidéző erő, addig a állandó mágneses szinkron motorok esetén a forgórészen mágnesek vannak. Az állórészre kapcsolt váltakozó áram forgó mágneses mezőt hoz létre, a forgórészen pedig a mágnesek miatt egy állandó mágneses mező van. Az ellentétes pólusok vonzzák egymást, ez lesz a forgást biztosító erő. Az ilyen motorok direktben a hálózatról segítség nélkül (beépített indítókalicka) nem is indíthatók, mindenképp szükség van frekvencia átalakításra, inverterre.
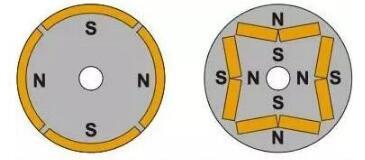
 Balra egy állandó mágneses szinkron-, jobbra egy aszinkron motor. Az aszinkron motor fordulatszáma csökken a terhelés növelésével (nő a szlip). A szinkron motor a terheléstől függetlenül tartja a szinkron fordulatszámot.
Balra egy állandó mágneses szinkron-, jobbra egy aszinkron motor. Az aszinkron motor fordulatszáma csökken a terhelés növelésével (nő a szlip). A szinkron motor a terheléstől függetlenül tartja a szinkron fordulatszámot.
1984-ben a General Motors és a Sumitomo Special Metals egymástól függetlenül, nagyjából egyszerre fedezte fel a korábbi állandó mágnesektől jóval kedvezőbb tulajdonságokkal bíró neodímium mágnest. Pontosabban a neodímium vas-bór ötvözete (Nd2Fe14B) bír a korábbi állandó mágnesektől (ferrit, alumínium-kobalt, szamárium-kobalt) jelentősen kedvezőbb tulajdonságokkal. A neodímium mágnesek megjelenése adott nagy lökést az állandó mágneses motorok elterjedésének.
Ritkaságok és nehézségek
17 elem tartozik ide. Az állandó mágneses motorokban használt igen erős mágnesek alapanyaga lehet a Neodímium, a Szamárium, a Terbium és a Diszprózium.
A 2010 környékén felfutott az okostelefonok, a lapos tévék és a szélgenerátorok gyártása. Ezekhez nagyon sok ritkaföldfémre van szükség, és a bányászat nagy része Kínában történik. Kína 2010-ben belengette a ritkaföldfémek kivitelének korlátozást, a Japánba irányuló exportot egy hónapra le is állította. Ennek hatására pár hét leforgása alatt 800%-kal megugrottak az ilyen fémek árai. Az árak azóta egy alacsonyabb szinten stabilizálódtak, de Kína azóta is előszeretettel szeret a ritkaföldfémek kivitelének korlátozásával fenyegetődzni, ha valaki húzgálja a bajszát.
A 2010-es évek elején lejátszódott történet az egyetemek és kutató laboratóriumok egész sorát indította a magas hatásfokú motorokban a ritkaföldfémek kiváltására. Ez adott kellő lökést a nagyobb teljesítményű szinkron reluktancia gépek ipari termelésbe vitelére, és irányította rá a figyelmet, hogy mennyire azonos irányba haladt a teljes villamos gépgyártás. Az eredmény az, hogy a kiemelkedően jó hatásfokú motoroknak csökken ugyan a ritkaföldfém felhasználása, de a mágneseket kiváltani egyelőre nem tudják, ezért az elmúlt pár évben a ritkaföldfémek felhasználása mégis növekedett.
Apró kondiból nagy hiány
Az angol MLCC-nek mondja azokat az apró, többrétegű kerámia kondenzátorokat (Multiayer Ceramic Capacitor), amiket ma már gyakorlatilag minden modern áramot fogyasztó eszközben megtalálunk az integrált áramköri lapokra forrasztva. Itt a távol-keleti országok szegényebb lakosainak okostelefonra kattanása, az egyre több és olcsóbb okos eszköz, a megújuló energiaforrások igénye és a felfutó Tesla együtt akkora keresletet támasztott, hogy 2017 és 2019 között egy sor termék pl. a GoPro kamrák gyártását is hátráltatta, hogy az ilyen kondenzátorokat gyártó cégek nem jól mérték fel a várható keresletet.A mai belsőégésű motoros autók vezérlőelektronikáihoz is szükség van autónként kb. 2000 ilyen apró kondira, az egyre bonyolultabb fedélzeti szórakoztató központokhoz pedig még többre. Egy elektromos autó vezérléséhez már tízezer ilyen kis kondi is kell. Egy újabb okostelefonhoz is több kell belőle, egy iPhone 6s-hez még 500 darab elég volt, egy iPhone X-hez már 1000 kell. A kínálati piac átfordulása keresletibe pedig árnövekedést okozott, ahogy a többi elektromos eszközhöz való komponens is drágulásba kezdett. Ezzel több évtizedes árcsökkenés ért véget az elektronikus termékek piacán.
Az MLCC kondenzátorok alternatíváinak keresése a ritkaföldfémes esethez hasonlóan megkezdődött, az első és legkézenfekvőbb eszköz az áramkörök újragondolása, a parazita kapacitások kihasználása.
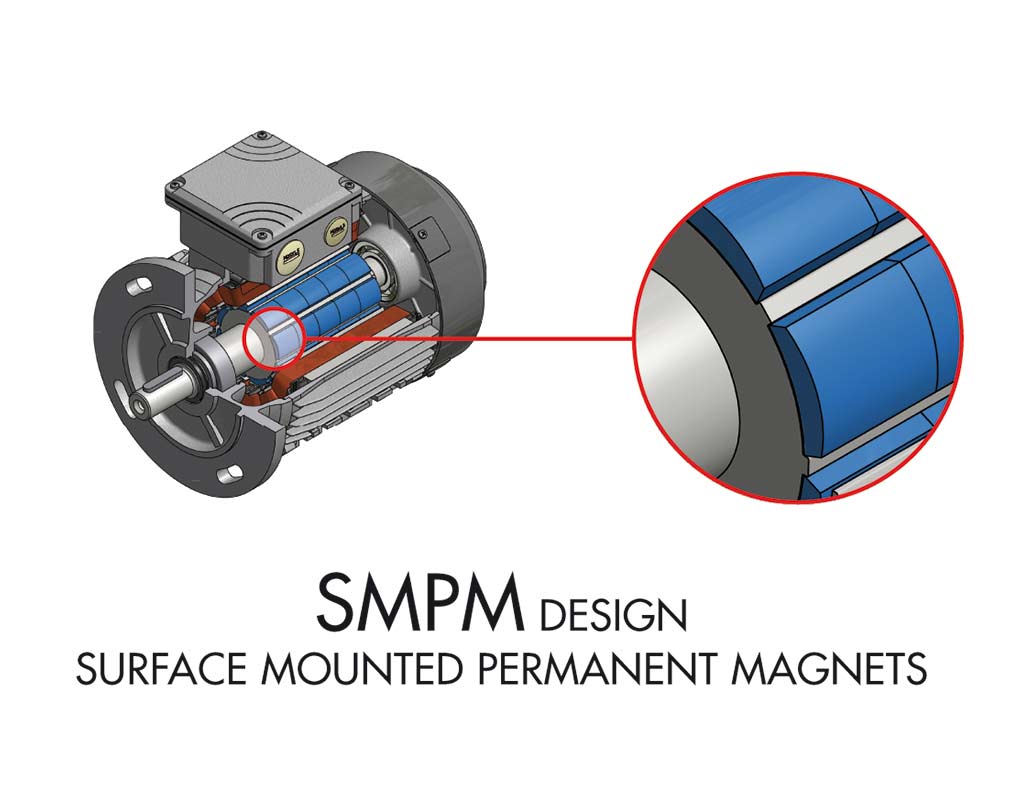
Az állandó mágneses motorok széles körű elterjedését a jobb hatásfok iránti igény és a ritkaföldfémekből előállított erős mágnesek terjedése tette lehetővé. Két fő fajtája van az állandó mágneses motoroknak: a forgórész felületére szerelt mágnesekkel készülő motor (angol rövidítése: SPM vagy SMPM) és a forgórészbe beágyazott, belső mágnesekkel készülő (IPM vagy IMPM). Az álladómágneses motorok forgórésze valamilyen lágyvas ötvözet, erre kerülnek rá ragasztással a mágnesek, ha felületre szerelt mágneses motorról van szó.
 A kép forrása: Lafert
A kép forrása: Lafert
A forgórész felületére szerelt mágnesekkel (SMPM - Surface Mounted Permanent Magnet) készülő motort egyszerűbb gyártani és vezérelni, először ez terjedt el. Azonos teljesítmény esetén jóval kisebb és könnyebb lehet az aszinkron motornál. Például egy 30 kW-os, 2 pólusú léghűtéses ipari aszinkron motor tömege 220-260 kg körül alakul. Egy ennek megfelelő állandó mágneses gép tömege 76 kilogramm, térfogata pedig a harmada. További trükkökkel ez még tovább csökkenthető, erre a cikksorozat következő részében térünk ki.
Hátránya, hogy sok erős, ritkaföldfém mágneseket használ. A nagy felületű mágnesek miatt nagyobb fordulatszámokra nem kifejezetten alkalmasak az ilyen gépek. Az ok részben a mágnesek ragasztása, részben a tehetetlensége. A nagy és nehéz mágnesekre a növekvő fordulatszámmal növekvő centrifugális erő hat, ami a mágnesek leválását szeretné előidézni. Ezt lehet javítani úgy, hogy a mágnesek köré, kívülre a leválásukat akadályozó anyagot szalagszerűen felcsévélünk. Ez az amúgy is drága motorok árát még tovább növeli.
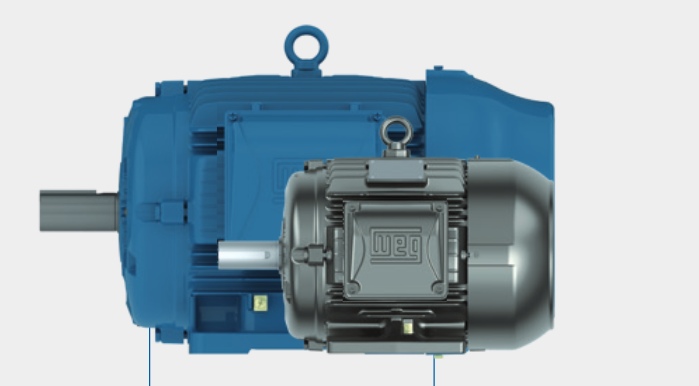 A kék egy aszinkron motor, a szürke a teljesítményben ugyanazt tudó állandó mágneses szinkron (Forrás: WEG)
A kék egy aszinkron motor, a szürke a teljesítményben ugyanazt tudó állandó mágneses szinkron (Forrás: WEG)
Villamos szempontból egy hengeres forgórészű szinkrongép. Nagy teljesítményű járműhajtásokban az aszinkron gépek után ilyen motorok jelentek meg először. Mivel a gerjesztés mindig a gépen belül van, ezért ha a motor tengelye forog, akkor zárt áramkörben folyni fog áram is. Az indukált feszültség jelalakja alapján lehet négyszögmezős a gépünk (BLDC motor), de lehet szinuszmezős is. A négyszögmezős gépek kis teljesítményen terjedtek el, drónokban és elektromos rollerekben találkozhatunk velük. Nagyobb teljesítményre a nyomatéklüktetésük és a zajuk miatt nem alkalmasak, járműhajtásokba szinuszmezős gépek kerülnek. Járművekben segédüzemek és kényelmi berendezések hajtására viszont nagyon is alkalmasak a BLDC motorok, jóval takarékosabb a működtetésük, mint egy egyfázisú aszinkron vagy kefés egyenáramú motoroké.
Tehát a gerjesztés a mágnesek miatt állandó, a motor tengelyének növekvő fordulatszáma egyre növekvő úgynevezett pólusfeszültséget (angol: Back EMF) eredményez. Ebből három hátrányos dolog is származik:
- A mezőgyengítés nehézkesen megvalósítható
- Inverterhiba esetén védelmi áramkörre van szükség
- Szerelés esetén le kell választani a motort az inverterről, nehogy a forgó tengely által gerjesztett feszültség balesetet okozzon
A mezőgyengítést hagyományosan úgy oldják meg, hogy a mágnesek gerjesztésének egy ellenirányú áramösszetevővel ellen dolgoznak. Ettől a teljes áram megnövekszik, a nagy fordulatszámú régióban rontja a teljes hajtás hatásfokát. A méretezésnél (a hűtésénél is) és a végsebesség meghatározásánál észnél kell lenni, a mágneseket így akár le is lehetne mágnesezni. A második problémára pedig egy példa: mivel mezőgyengítésben dolgozunk, ezért az inverter a maximális kimeneti feszültségével dolgozik, ez jut a motorra is. Ha hirtelen megszakadna az áramunk, az a mágnesekkel ellendolgozó áramösszetevő megszűnését is jelenti. A motor pólusfeszültsége megnövekedne, akár az inverterre is veszélyes mértékben.
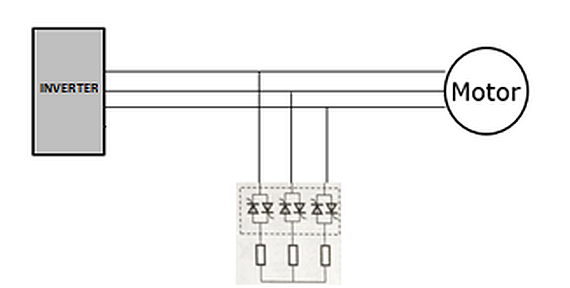 Védelmi áramkörre egy példa.
Védelmi áramkörre egy példa.
Ha motorunkat olyan tartományban használjuk, ahol a pólusfeszültség már magasabb az ellenirányú áramösszetevő nélkül (pl. inverterhiba esetén), akkor a motor és az inverter közé a fékszaggatóhoz hasonló védelmi áramkört célszerű beépíteni.
Az állandó mágneses motorok nagy előnye, hogy a pólusszám növelésével nem romlik a teljesítménytényező, és a motor hatásfoka sem, mint az aszinkron motoroknál. A mágnesek miatt a motor tömege is kisebb. Ez alacsony fordulatszámot és nagyon nagy nyomatékot jelent, jó hatásfokkal. Sőt, a nagyobb pólusszám kisebb és könnyebb mágneseket és vékonyabb vastestet is jelent, ha azonos nyomatékot szeretnénk.
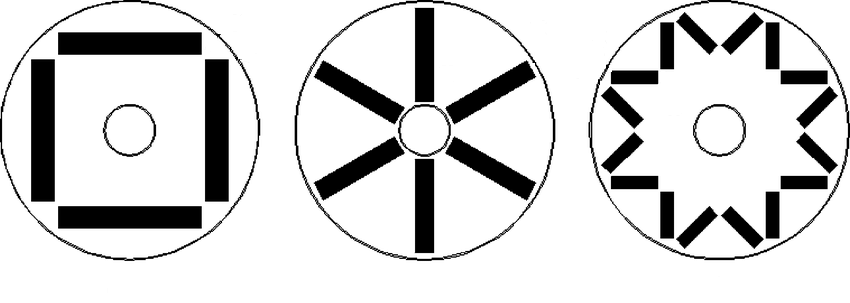
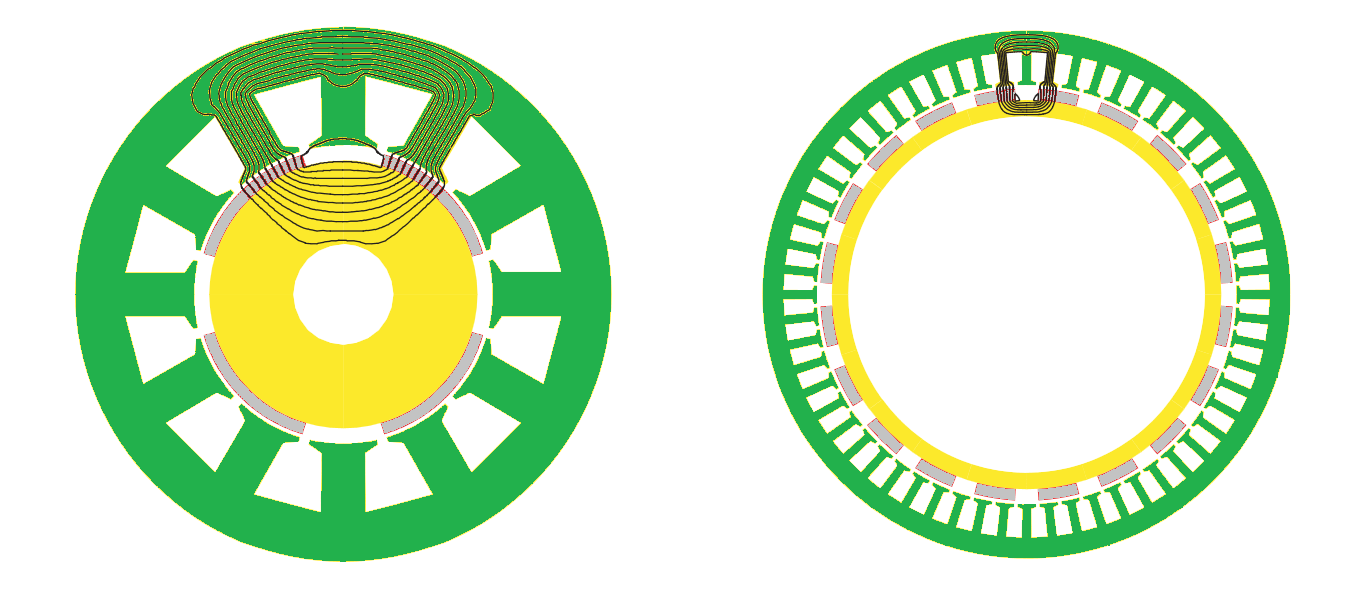 Balra egy 4 pólusú, jobbra egy 20 pólusú állandó mágneses motor.
Balra egy 4 pólusú, jobbra egy 20 pólusú állandó mágneses motor.
A nagyobb pólusszám nagyobb nyomatékot, és alacsonyabb fordulatszámot jelent. Ez egy sor ipari alkalmazásban lehetővé tette, hogy elhagyhassák a mechanikus áttételt. A mechanikus áttételeknek is van veszteségük, kopnak, kenést igényelnek, ezért az elhagyásuk ilyen szempontból kedvező. Hátrány, hogy áttételek nélkül vagy akárcsak egyetlen fix áttétellel is a járművekben nagyon széles fordulatszám tartományban használhatónak kell lennie a motorunknak, lásd mezőgyengítés.
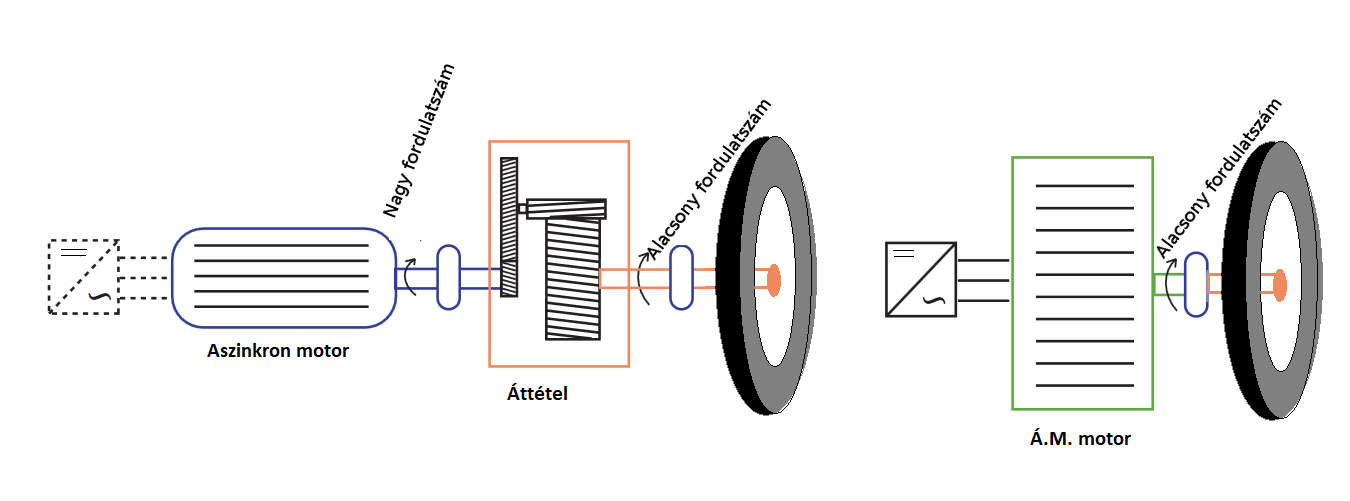
Hasonlítsuk össze a hagyományos aszinkron motort és áttételt használó két villamosnak, és az áttétel nélküli állandó mágneses szinkron motort használó Skoda 15T ForCity villamos motorjainak pár paraméterét! A Combinóban egy motor a tengely két végén lévő 1-1 áttételen keresztül kettő kereket hajt meg, a Skoda csak egyetlen egyet. Ezért a Combino adataihoz zárójelben odaírjuk az egy kerékre jutó adatot. Az éta(η) a hajtómű hatásfokát jelöli, ami valahol 0,85 és 0,98 között lehet.
| Villamos | Siemens Combino | CAF Urbos 3 | Skoda 15T |
| Motor | Aszinkron (IM) | Aszinkron (IM) | SPM |
| Típus | Siemens ??? | TSA TMR-36-18-4 | Skoda HLU 3436 P/44-VA |
| Névl. teljesítmény | 100 kW (50 kW*η) |
140 kW (70 kW*η) |
46 kW |
| Névl. fordulatszám | 1580 [1/perc] | 2373 [1/perc] | 196 [1/perc] |
| Névl. nyomaték | 1180Nm (590Nm*η) |
663 Nm*η | 2260 Nm |
| Pólusszám | 6 | 4 | 44 |
| Áttétel | 5,44 | 5,44 | - |
| Nyomaték egy keréken |
3209 Nm*η | 3606 Nm*η | 2260 Nm |
| Tömeg | 870 kg; a motor és a két hajtómű együtt |
603 kg, hajtómű nélkül, két motor tömege |
252 kg |
Hiába az alacsony tömeg, a jó hatásfok, de mégis van az áttétel nélküli motoroknak egy nagy hátrányuk. A rugózatlan tömeget növelik jelentősen, ez pedig kedvezőtlen a vasúti pályára. Hasonló elrendezés esetén közúton a futómű alkatrészei vannak kitéve fokozott igénybevételnek.
A felületre szerelt mágneses gépek a személyautókban nem is terjedtek el, nagyobb járművekben is csak az egyszerű gyárthatóság miatti kényszer szülte az egyre erősebb, de valószínűleg kérész életű jelenlétüket. Az iparban a szélgenerátorokban, a hajózásban és az élelmiszeriparban (üdítő és sörgyártás - pályahajtások) terjedtek el az ilyen motorok, már szerteágazó a tapasztalat velük.
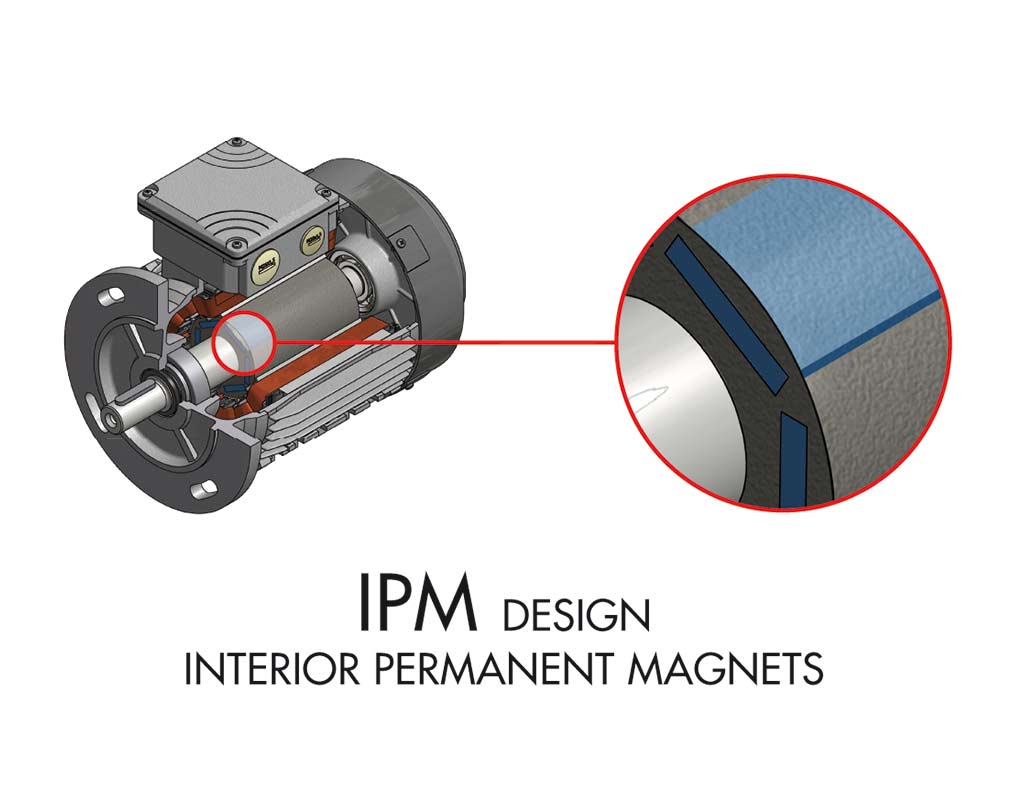
Belső mágnessel készülő állandó mágneses gépek (IPM)
A forgórészbe beágyazott belső mágnesekkel készülő motorokhoz (IPM - Internal Permanent Magnet) már elég kevesebb mágnes és a mágnesek ,,ereje" is kisebb lehet. A mágnesek a forgórészen belülre, a palásthoz képest valamilyen szögben vannak beépítve. Ez a beépítési mód azt eredményezi, hogy a gép belsejében a mágneses vezetőképesség az egyik irányba jobb, mint arra merőlegesen. Ez szolgáltatja a reluktancia-nyomatékot, ez a hengeres forgórészű gépeknél nem volt jelen. Emiatt a nyomaték megjelenése miatt lehet kisebbre venni a mágnesek nagyságát és ,,erejét". Villamos szempontból kiálló pólusú szinkrongépek.
Fluxukondenzátor helyett reluktancia-nyomaték, az új csodaszer
A reluktancia a mágneses ellenállás. De mi a különbség a hagyományos motorokhoz képest? Míg az aszinkron gépben az indukciót használjuk, addig a reluktancia motorokban a mágneses ellenállás változását. Itt nem egy zárt alumínium vagy réz vezető van a forgórészben, hanem egy mágnesezhető (ferromágneses) anyag, például valamilyen vas ötvözet. Ez a forgórész a legkisebb mágneses ellenállás (reluktancia) irányába fog beállni. Az irány pedig a háromfázisú forgó elektromágneses mező miatt folyton változik, forog.
A reluktancia-nyomaték az elvi okok miatt valamennyi villamos gépben jelen van, de nem egyforma nagyságrendben. Az aszinkron motorokban például nem szeretjük, mert nyomatéklüktetést és zajt okoz.
Az ilyen motorok gyártása és vezérlése is jóval bonyolultabb az eddig látottaknál. A mágnesek beépítése nagyon sokféleképpen történhet, ezt mindig az adott felhasználásra érdemes optimalizálni.
Mivel itt már kisebb a mágnesek tömege és ezeket nem is ragasztás tartja a helyükön, ezért nagyobb fordulatszámmal foroghat az ilyen motor mechanikus oldalról. Villamos oldalról is, mivel kisebb a mágnesek ereje, ezért mezőgyengítéses üzemben kevésbé kell ,,elrontani" az általuk indukált feszültséget.
Ebben a részben csak 2:55-ig érdekes nekünk ez a videó. Folyt. köv.
Elterjedésének a Toyota adott hatalmas lökést, a Priusnak már az első generációja is ilyen villamos motorokat kapott és a többi Toyota hibrid is ezt használja. Azóta sok követőre találtak, a Nissan Leaf, a Chevrolet Bolt, a Jaguar I-Pace is ilyen motorokat használ. Az ok, hogy mezőgyengítéses üzemben nagyon nagy fordulatszámokat lehet elérni ezzel a motorral, és a többihez képest még említésre érdemes nyomatékunk is marad.
 Forrás: Lafert
Forrás: Lafert
Hagyományos kiálló pólusú szinkrongépet is találunk korszerű elektromos autóban, mégpedig a Renault a Zoéban használ (WFSM - Wounded Field Synchronous Motor) ilyet. Itt nincsenek mágnesek, a forgórész is tekercselt. A gerjesztést a forgórész tekercselésre kapcsolt egyenfeszültség végzi, amit csúszógyűrűn keresztül juttatnak oda. Nem várható, hogy ez a motor a csúszógyűrű karbantartási igénye miatt elterjedjen. Az itt felsorolt többi motor viszont tudja az aszinkron gép egyik nagy előnyét, hogy a csapágyakon kívül nincs bennük más kopó alkatrész.
Állandó mágneses motorok buszokban

Több gyártó is kínál állandó mágneses motorokat, most az oszták Traktionssysteme Austria motorjait nézzük meg. Ennek a gyártónak a motorjai kerülnek az európai trolibuszok, villamosok és mozdonyok nagy részébe. Kiepe, Medcom és ABB hajtásvezérlőkhöz általában ezeket a motorokat ajánlják.
| Típus | TSA TMF 35-44-4 | TSA TMPW 38-26-8 | TSA TMPW 32-27-8 | TSA TMPF 35-28-8 |
| Működési elv | Aszinkron | PM | PM | PM |
| Hűtés | Léghűtés | Folyadékhűtés | Folyadékhűtés | Léghűtés |
| Névl. teljesítmény | 160 kW | 160 kW | 160 kW | 200 kW |
| Névl. ford. szám | 1477 [1/perc] | 1500 [1/perc] | 2400 [1/perc] | 1932 [1/perc] |
| Max. nyomaték | 1401 Nm | 3100 Nm | 2250 Nm | 1500 Nm |
| Max. teljesítmény | 300 kW | 300 kW | 260 kW | ?? |
| Max. ford. szám | 4466 [1/perc] | 3800 [1/perc] | 5400 [1/perc] | 5000 [1/perc] |
| Tömeg | 480 kg | 300 kg | 265 kg | 350 kg |
Látszik, hogy az álladó mágneses motorok tömege alacsonyabb már azonos nyomaték esetén is. Van a gyártó kínálatában 305 kg-os aszinkron motor is, hasonló névleges teljesítménnyel, de annak a túlterhelhetősége csak 12%-os és a nyomatéka is kisebb.
Az állandó mágneses szinkronmotorok táplálása hasonlít az aszinkron motorokéhoz, a motorra kapcsolt három fázisú váltakozó feszültség nagyságát a frekvenciával arányosan növeljük, hogy elinduljon a motorunk. Persze a pontos vezérléshez itt is mezőorientált szabályzásra vagy közvetlen nyomaztékszabályzásra van szükség. A többféle működési üzemmód miatt ez kiegészül még általában egy maximális nyomaték per áram algoritmussal és a mezőgyengítés speciális eljárásával, ami motorfajta függő.
Az nem mindegy, hogy a mágnesek induláskor hogyan állnak, ezért a motorok tengelyére már nem csak a fordulatszámot, hanem a pontos pozíciót is érzékelő jeladót kell szerelni. Újabban a hajtásszabályozók képesek érzékelő nélkül is állandó mágneses motorokat hajtani, itt vagy egy kezdeti keresőimpulzussal megállapítják a forgórész helyzetét, vagy pedig beállítják a forgórészt egy ideálisnak gondolt pozícióba és innen indul a hajtás. Ez utóbbi módszert járműhajtásoknál nem lehet használni, érzékelő nélküli üzemmel pedig az aszinkron motorokhoz hasonlóan a felhasználási terület miatt sorozatgyártásban nem játszanak, de segédüzemekhez érdekes lehet, ha a jeladót a motor tengelyéről el lehet hagyni (ár).
A reluktancia motorok

Mi lenne, ha a reluktancia-nyomatékot csak önmagában használnánk? Régóta ismert és használt motorokról van szó, de főleg az alacsony teljesítményű gépek terén. Az egyre jobb hatékonyságra törekvésre az állandó mágneses motorok használata volt az első válasz, de 2011 körül a ritkaföldfémek hirtelen megugró ára miatt egyre több egyetem és fejlesztőközpont figyelme az alternatívák felé fordult.
A régóta ismert típusa a reluktancia gépeknek a kapcsolt reluktancia motor (SRM) motor. A kapcsolt reluktacia motor a legtöbb tévhit melegágya, de ezeket a motorokat járműhajtásban (egy-két kísérlet kivételével) nem használják. Eltérő a táplálásuk az elterjedt motorokhoz képest, kiemelkedő a hatásfokuk, de zajosak és nagy a nyomatéklüktetésük.
Melyik autóban milyen motor van?
| Tesla Model 3 |
Tesla Model S |
BMW i3 | Audi e-tron | Toyota Prius | Renault Zoé | |
| Típus |
Hátul: PMaSynRM |
Eredetileg: Aszinkron |
PMaSynRM | Aszinkron | IPM | WFSM |
A 2010-es években mégsem ebből lett nagyobb sorozatban használható fejlesztés, hanem a szinkron reluktancia (SynRM) motorokból. Először az ABB, majd a Siemens és kisebb olasz gyárak jelentek meg ilyen motorokkal. Ezeknek a gépeknek a működéséhez nincs szükség semmilyen mágnesre, az állórészük pedig megegyezhet az aszinkron motorokéval. Az energiahatékonyságuk kiemelkedő, a forgórész hőmérsékletük jóval alacsonyabb az aszinkron gépeknél. Ez jótékony hatással van a szigetelésekre és a kenőanyagokra.
Hátrányuk a rossz teljesítménytényező (cos φ), ezért sokszor a teljesítményükből következőnél egy lépcsővel nagyobb inverterrel kell ezeket a motorokat táplálni. Az inverterek vezérlése is bonyolultabb a megszokottnál, de már az iparban egyre több készülék tudja kezelni az ilyen motorokat is. Járművekben ezeket a motorokat egyelőre nem használják a bonyolult gyárthatóság és nagy inverterigény miatt. Kezdetben a gyártók azt állították, hogy csak a motorhoz tartozó, házon belülről származó inverter tudja ezt az egzotikusnak tűnő motort hajtani, de erre cáfolat már korán érkezett, azóta pedig rutin az ilyen motorok kezelése szinte bármilyen ipari frekvenciaváltóval. Fordulatszám- és pozícióérzékelő nélkül is képesek az inverterek hajtani.
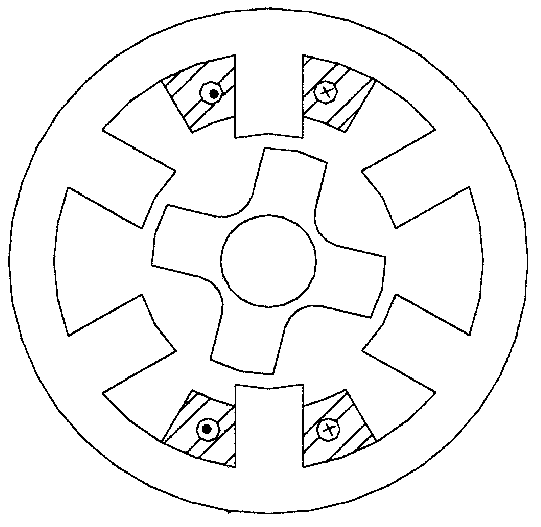
Mágnessel segített szinkron reluktancia (PMaSynRM)
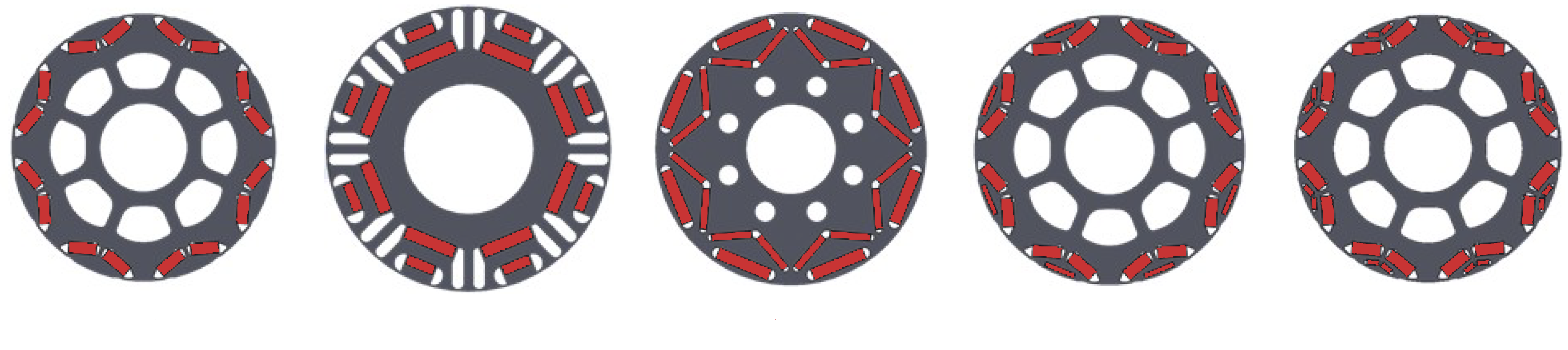
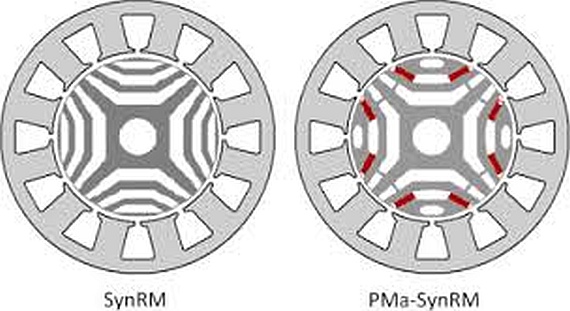 Pirossal a mágnesek
Pirossal a mágnesek
Ami számunkra érdekesebb a mágnessel segített szinkron reluktancia (PMaSynRM) motor. Mondják még hibrid szinkron motornak is, mivel mágneseket is használ és relauktancia-nyomatékot is. Vagy akár SRIPM-ként is hivatkozhatnak rá. A mágnesek akár ferrit mágnesek is lehetnek, de ha ritkaföldfémből is készülnek, akkor sincs sok belőlük. Hogy bonyolítsuk, van hibrid mágneses motor is, ahol vegyesen használnak ferrit- és ritkaföldfém mágneseket.
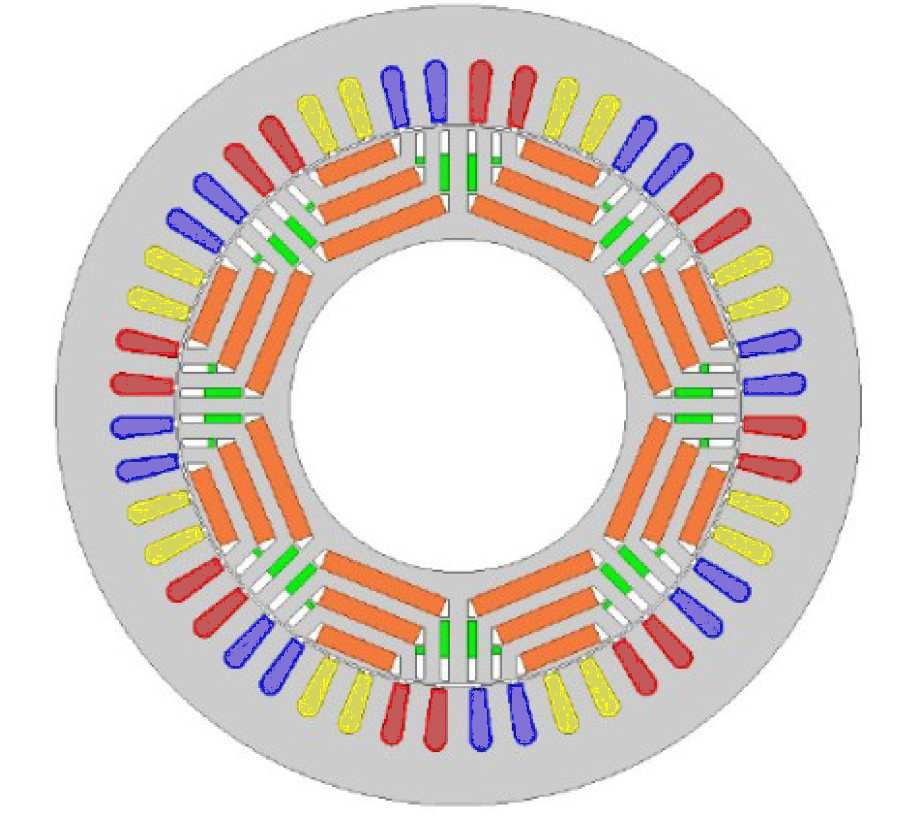 A kék, piros és a sárga az állórész tekercselés három fázisa. A narancssárga a ferrit mágnes, a zöld a neodímium. (Forrás:[5])
A kék, piros és a sárga az állórész tekercselés három fázisa. A narancssárga a ferrit mágnes, a zöld a neodímium. (Forrás:[5])
Ezek a motoroknak nem jelentős a pólusfeszültsége sem. A mágnes nélküli szinkron reluktancia motornál sokkal jobb a teljesítménytényezőjük. Nehézjárművekhez sorozatgyártásban a Danfoss és a Dana kínál ilyen motorokat. De mi a különbség a belső mágneses motorhoz képest? Jó kérdés, leginkább az, hogy a nyomaték nagyobb részét itt már a reluktancia nyomaték és már nem a mágnesek biztosítják. A Tesla Model 3 hátsó motorja kapcsán van is keveredés, hogy az milyen motor. Sok legenda és hájp kering, de a megbontott motorokat látva az egy belső mágneses szinkrongép, amit lehet mágnessel segített reluktancia motornak is hívni. Ahogy a BMW i-sorozatában is ilyen motorokat használnak, még ha a forgórész kinézete nem is teljesen hasonlít.
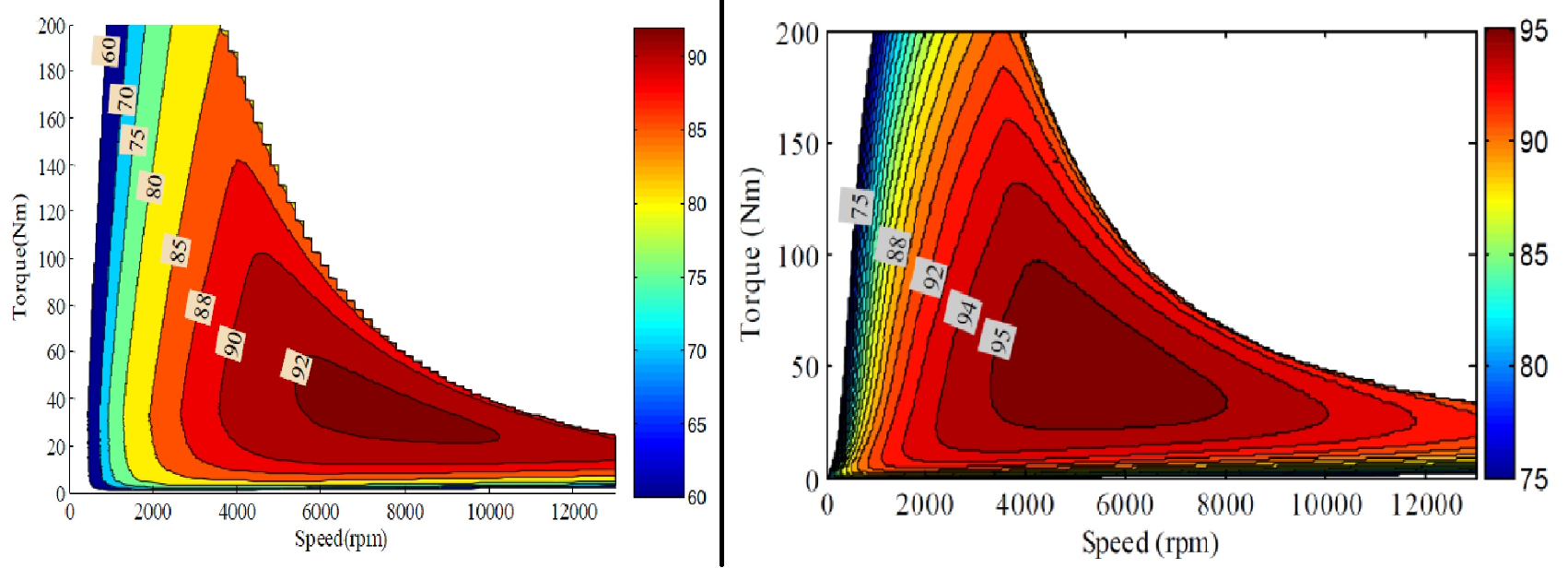
Balra egy szinkron reluktancia motor, jobbra pedig egy mágnessel segített változatának hatásfok térképe. (Forrás: [3])
Az ilyen motorok gyártói már nem csak azon versenyeznek, hogy 95 vagy 96%-os a motorok hatásfoka, hanem a legmagasabb hatásfok mekkora fordulatszám- és nyomaték tartományban elérhető, illetve kinéznek egy alacsonyabb hatásfokot, például 90%-ot, vagy 85%-ot és ott is az számít, hogy mekkora tartományban elérhető. Minden egyes plusz kilométer lehetősége számít.
Összehasonlítás
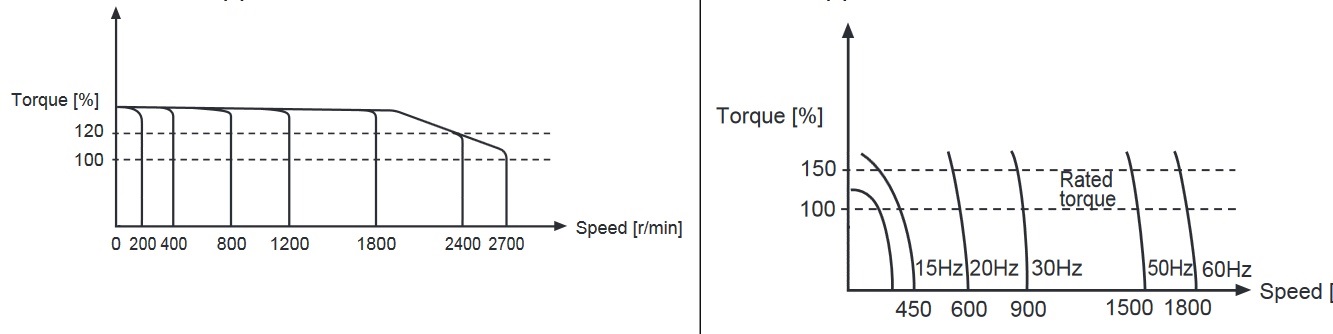
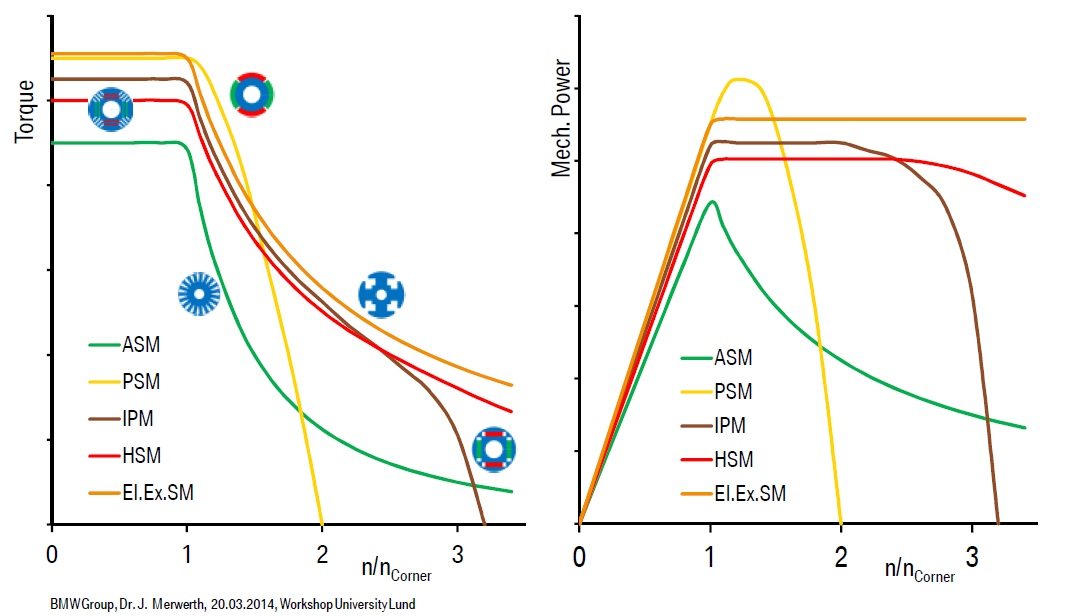 A fordulatszám függvényében melyik motor mekkora nyomatékot és teljesítményt tud relatíve?
A fordulatszám függvényében melyik motor mekkora nyomatékot és teljesítményt tud relatíve?
ASM: aszinkron, HSM: mágnessel segített szinkr. reluktancia, El.Ex.SM=elektromosan gerjesztett, mágnes nélküli szinkron motor. (Forrás: BMW [4])
Melyik a nyerő? Nyerő nincs, a megfelelő alkalmazáshoz, és járműhöz, felhasználáshoz illeszkedő viszont lehet. Oké, de mit mire használjunk? Ha a célunk a könnyű karbantarthatóság, az örök élet+1 nap élettartam, és az alacsony beszerzési ár, akkor marad a jó öreg léghűtéses aszinkron motor. Ez is el tud romlani, például a csapágyak vagy a tekercselés szigetelése. A baj az, hogy megjelent a lehető legkisebb méretre és tömegre az igény, innentől csak bonyolódnak a dolgok. Ahol még labdába tud rúgni a jó öreg aszinkron gép, az a nagy fordulatszámú tartomány. Az egyszerű mezőgyengítési módszer mellett az itt tapasztalt viszonylag jó hatásfok szól mellette. Ezért hosszabb távolságok megtételéhez vagy nagy módosítású áttételekkel elfogadható hatásfokú lehet a hajtásunk. Jobb hatásfokú és könnyebb persze lesz tőle. Főleg részterhelésen gyenge a hatásfoka.
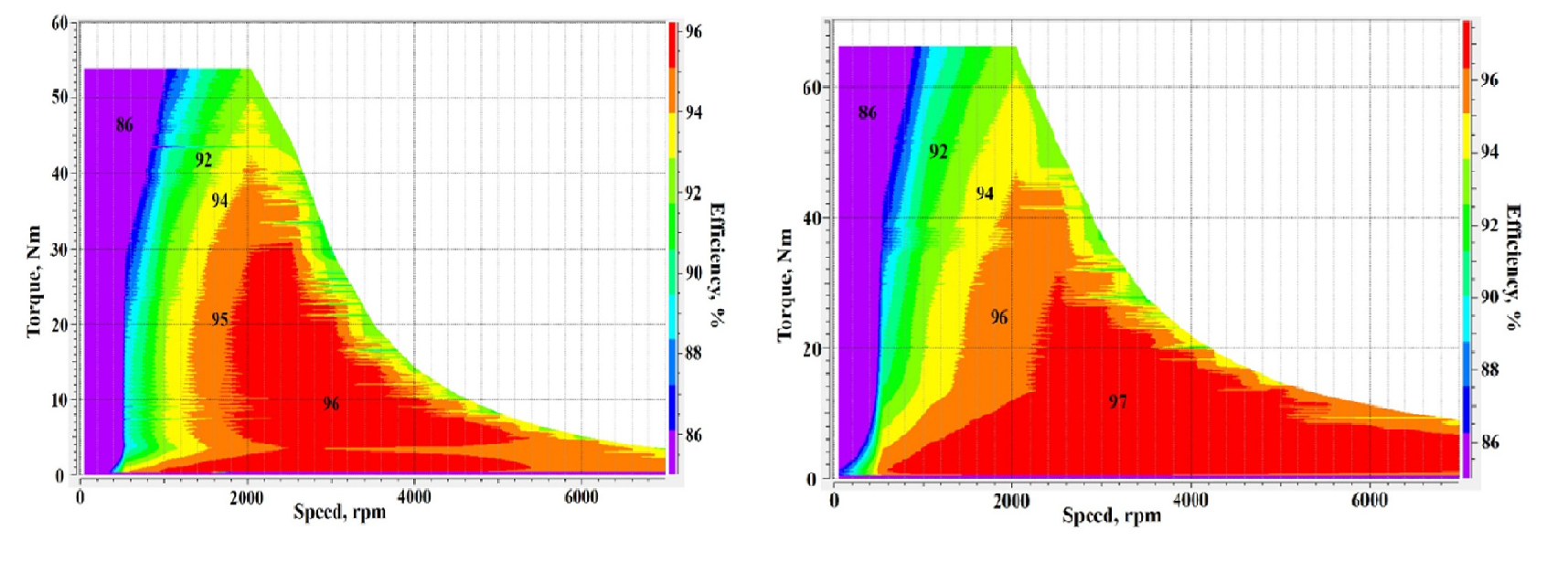
 Balra egy aszinkron motor, jobbra pedig egy mágnessel segített szinkron reluktancia hatásfok térképe. [5]
Balra egy aszinkron motor, jobbra pedig egy mágnessel segített szinkron reluktancia hatásfok térképe. [5]
A felületre szerelt mágnesekkel készülő (SPM) motorok alacsony fordulatszámokon nagyon hatékonyak, áttétel nélküli hajtásokra ideálisak. Ezt a járműhajtásokban inkább nem szeretjük. A belső mágnesekkel készülő (IPM) motorok és főleg a mágnessel segített szinkron reluktancia motorok az igazán széles fordulatszám tartományban használható és a teljes tartományban nagyon hatékony gépek. Lássunk egy példát! Egy 2010-es Toyota Prius egyik IPM motorját cseréljük le különféle elveken működő, azonos helyre beépíthető, hasonló képességű, de eltérő elven működő gépekre. Két különféle menetciklus szerint zajlott a vizsgálat [5], az alacsony fordulatszámokat és nyomatékokat előtérbe helyező NEDC és a nagyobb fordulatszámokat és terheléseket előíró ARB szerint.
| Motor műk. elv | Aszinkron | SynRM | IPM | PMaSynRM |
| Átlagos hatásfok, NEDC-ciklus szerint |
75,24 % | 76,44 % | 86,94 % | 88,74 % |
| Átlagos hatásfok, ARB-ciklus szerint |
65,15 % | 62,61 % | 79,65 % | 87,7 % |
A fenti két hatásfoktérképen is kiszúrhatunk magunknak pár pontot, hogy érdemes volt-e újabb féle motorokkal szórakozni. Például percenként 10000-es fordulatszámnál az aszinkron motorunk már nem is tud 50 Nm nyomatékot leadni, csak 40-et. Ezt 88%-os hatásfokkal teszi, a jobboldali pedig 94%-kal. Ha ötezres fordulatszámon szeretnénk 90 newtonméter nyomatékot, akkor a mágnessel segített szinkron reluktancia motorunk 95%-os hatásfokot tud, az aszinkron csak 90%-ot. Végül percenkénti 2000-es fordulatszámon, 50 Nm nyomatékhoz 92% vagy pedig 80% hatásfok tartozik, nem mindegy. Érdemes észben tartani, hogy nem csak hajtunk, hanem fékezünk is a motorunkkal, az akkumulátorok töltési korlátai pedig általában kisebb fékezési nyomatékot tesznek lehetővé, mint amivel hajthatunk. Ezek a részterheléses üzemállapotok lesznek.
A cikk elején lévő példának ugorjuk neki ezekkel a konkrét adatokkal. A teljesítményt a nyomatékot és a fordulatszámot megszorozva, majd a mértékegységek miatt 9550-nel elosztva kapjuk. Azaz 50 Nm 2000-es percenkénti fordulatszámon az 10 kW.
- Ha hajtani szeretnénk 10 kW / 0,8= 12,5 kW ; vagy 10 kW / 0,92 = 10,87 kW ; benzin motorral: 10 kW / 0,171 = 58,48 kW
- Ha fékezni szeretnénk: 10 kW * 0,8= 8 kW ; vagy 10 kW / 0,92 = 9,2 kW
Míg gázolajjal egy személyautó 50 literes tankban 570 kWh energiát tud magával vinni, addig egy VW ID3 elektromos autó csak 45, 58 vagy 77 kilowattórányi akkumulátort. És nehezebb is lesz az autó. Buszoknál is hasonló a helyzet, egy 250 literes üzemanyagtartály kb. 2850 kWh energiát jelent, míg akkumulátorokból szóló buszok esetén 400 kWh körül, csuklósok esetén 6-700 kWh körül mozog a még elcipelhető mennyiség. A buszoknál már a férőhely rovására.
Mi kerül a buszokba?

A fejlesztések a személyautók környékén a kisebb teljesítmény és a nagyobb sorozatszámok miatt hamarabb megjelennek. A buszoknak a dízeles világban hagyományosan a kamionok a közeli rokonaik gépészetileg. Az elektromos hajtások esetén a vasúti vontatás mellett a hajózásra érdemes figyelni, mivel ott egyre gyakrabban a központi dízelmotorok csak generátort forgatnak és a különféle haladó, manőverező mozgásokhoz egyre inkább elektromos motorokat használnak. Ha a hajó segédüzemei is villamosítva vannak, akkor ez olyan szempontból is előnyös, hogy a kikötőkben az országos villamos hálózathoz csatlakozva már nem kell járatniuk a belsőégésű motorjaikat álló állapotban. Ez jót tesz a kikötők levegőminőségének, főleg ha az egy város közepén fekszik. A vírus előtt jóval nagyobb piacot is jelentettek a hajógyárak a közúti elektromos buszoknál, kamionoknál.
Egyéb módszerek?
Az aszinkron motort és az ettől eltérő elven működő motorokat láttuk, de ezekkel együtt vagy ezek nélkül is számtalan egyéb érdekes módszer létezik arra, hogy a járművünk hajtását még hatékonyabbá tegyük, amire a belső égésű motoroknál már nem volt lehetőség. Ezeket a cikksorozat következő részében nézzük meg.
Felhasznált és ajánlott irodalom:
- Farkas András - Gemeter Jenő - Dr. Nagy Lóránt: Villamos gépek
[1]: Ehsani, M., Yimin, G., Sebastien, E.G. and Ali, E., (2005). Modern electric, hybrid electric, and fuel cell vehicles: fundamentals, theory, and design.
[2] Drivemode: Report on considered electrical motor technologies, evaluation matrix, concept decision
[3]: An Investigation into the Effect of PM Arrangements on PMa-SynRM Performance, IEEE Transactions, 2018.07
[4]: Dr.-Ing. J. Merwerth : The Hydrid-Synchronous Machine of the new BMW i3 & i8
- Danfoss Drives: Facts Worth Knowing about AC Drives
[5]: Z.Q.Zhu,Fellow, Royal Academy of Engineering,W.Q.Chu, and Y. Guan - Quantitative Comparison of Electromagnetic Performance of Electrical Machines for HEVs/EVs
