
 Egyre több helyen hódít teret az elektromos hajtás. Lássuk hogyan működnek a motorok! Elsőre az aszinkron motorokról lesz szó.
Egyre több helyen hódít teret az elektromos hajtás. Lássuk hogyan működnek a motorok! Elsőre az aszinkron motorokról lesz szó.
Villanyautó így, elektromos busz úgy, de mégis mi és hogyan mozgatja ezeket? Az akkumulátorokkal és a töltésükkel csak a gond van, és még egy jó ideig ez így is marad. Az elektromos motorok előnyei a belsőégésű elődjeik súlyos kompromisszumait messze túlszárnyalva és az előbb említett kötöttségeket elhomályosítva hozhatják el az elektromobilitás korszakát. Mik ezek az előnyök?
- A legnagyobb nyomaték elérhető nulla fordulatszámtól, nincs szükség alapjáratra se.
- Széles fordulatszám tartomány, nincs szükség nyomatékváltóra.
- Sokkal jobb hatásfok.
- Egyszerűbb és pontosabb szabályozhatóság.
- A mozgási energia egy részét képes visszanyerni.
- Rugalmasabban használható a járművekben.
- Csendes és nem okoz (valójában de, csak sokkal kisebbet) rezonanciát, vibrációt.
- Nincs helyi légszennyezés
Az alapokat vesszük át, ezért sem a Lorentz-erőt sem a mezőorientált szabályzás forgóvektorait nem tárgyaljuk. Csak annyira megyünk bele, amennyire egy átlag autós tudja a különbséget a kétütemű és a négyütemű motorok működése között.
Elektromos járműveket már jó ideje használunk, főleg felsővezetékhez kötötten, ezek utasként is ismerősek lehetnek. A korábbi trolibuszokban használt egyenáramú hajtásokról itt kiváló leírásokat találhatunk. Rövid összefoglalása a történetnek, hogy az egyenáramú motoroknak korábban több hátránya is volt: a visszatáplálás csak nehézkesen volt megvalósítható, amíg a teljesítményelektronika el nem ért egy bizonyos fejlettségi fokot, ugyanígy az indításuk is nagy veszteséggel történt. A következő, hogy ezek a motorok nehezek és nagyok voltak. A fő hátrányuk pedig, hogy kopó, rendszeres karbantartást igénylő alkatrészeket, a kommutátort és a szénkeféket tartalmazták. Ilyen motorokat használó járművek a mai napig forgalomban vannak, például az Ikarus-GVM trolibuszok, a Ganz és Tátra villamosok, a V43-as, V63-as mozdonyok, stb. Ezért a fejlesztések iránya az ennyire sok kopó alkatrészeket nem tartalmazó, ezért jóval kevesebb karbantartást igénylő kalickás- vagy rövidre zárt forgórészű, háromfázisú aszinkron gépek felé fordult. Itthon a BDVmot motorvonatokkal indult meg az elterjedésük, ilyen motorok vannak az Ikarus 435T trolibuszokban és az ettől újabbakban, a Combino villamosokban, az Alstom metrókban.
Az aszinkron motor
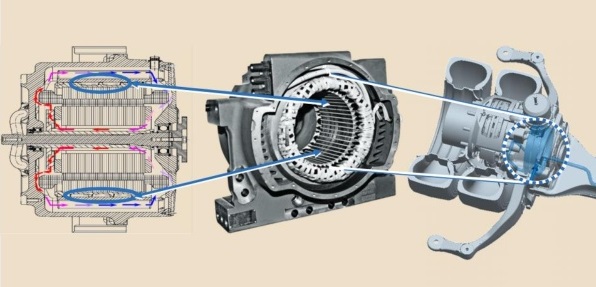
 Egy átlagos ipari aszinkron motor (Kép: Siemens)
Egy átlagos ipari aszinkron motor (Kép: Siemens)
A járművekben használt kalickás forgórészű aszinkron gép igen egyszerű jószág, a működésének alapelve, hogy a térben eltolt tekercseléseire, időben váltakozó áramot kapcsolva forgó elektromágneses mezőt kapunk. Az állórész egy házból és az ebben lévő lemezelt vastestből épül fel. A tekercselés a vastestben van, úgynevezett fogakban elhelyezve. A változó (forgó-) mágneses mezőn belülre egy zárt vezetőt elhelyezve a vezetőben feszültség indukálódik és ez a feszültség áramot indít meg a vezetőben. A meginduló áram hatására erő hat a vezetőnkre, elkezd forogni. A valóságban ez a zárt vezető egy kalicka, ez a forgórész. A forgórész jó vezető anyagból, jellemzően alumíniumból készül. Ez olcsó és olcsón gyártható, de újabban az egyre jobb hatásfok iránti igények miatt már rézből is készülhet. Az állórész lemezelt vasteste dinamólemezből készül, ami vagy ötvözetlen vagy szilíciummal ötvözött acél lemez.
 Így lesz a 3 fázisú váltakozó áramból forgás. (Forrás: http://people.ece.umn.edu/users/riaz/)
Így lesz a 3 fázisú váltakozó áramból forgás. (Forrás: http://people.ece.umn.edu/users/riaz/)
Az aszinkron motorban nem pont olyan gyorsan forog a forgórész, ahogy az elektromágneses mező forog, hanem egy kicsit lemarad, ezért nevezzük ezt a motort aszinkronnak. Ha a gép terhelését növeljük, akkor a forgórész lemaradása növekszik, de a motor nyomatéka is. A lemaradás neve szlip, és a motornak csak akkor van nyomatéka, ha van szlipje. Az aszinkron gépekben a kopó alkatrészek a forgórész két végén lévő csapágyak, amik az állórészhez kapcsolják, és ennyi. Egy belsőégésű motorhoz képest a különbség jelentős.
A hőskorszakot (Kandó-féle forgógépek) leszámítva az aszinkron gépek két ok miatt nem terjedtek el korábban. Az első, hogy a fordulatszám változtatásuk a megfelelő teljesítményelektronika nélkül nem volt gazdaságosan és alacsony tömeggel egyszerűen megvalósítható. A másik, hogy egy fázisú váltakozó- vagy a kétsarkú egyenfeszültségből nem volt kicsi és könnyű eszköz háromfázisú váltakozó feszültséget előállítani. A megoldást a teljesítményelektronika fejlődése hozta el.
Vényolc helyett hat pólus?
A három hengeres belsőégésű motor gáz, a négyhengeres már elmegy, a sorhat már valami és vényolc a király. Mi lesz a villanymotorok királya? :) Valószínűleg nem az aszinkron gép, de mielőtt még mélyebb vizekre evezünk nézzünk át pár alapfogalmat!
Névleges feszültség - Ahogy a konnektorokban is mindig ott van a 230 volt, az aszinkron gépek esetén is hasonlóan kell érteni a feszültséget. A névleges érték felé nem lehet a feszültséget növelni, mert a motor tekercselésének van egy szigetelése, ami ettől magasabb értéket nem visel el.
Névleges áram - Ha bedugtuk a fogyasztónkat a konnektorba és bekapcsoltuk, akkor fog folyni áram. Feszültséggenerátoros táplálás esetén az áram nagyságát a terhelés határozza meg. Ha intenzívebben gyorsítunk, lassítunk, az nagyobb terhelés, nagyobb áram. Ugyanígy a több utas, vagy nagyobb emelkedő is. A névleges érték az, amit tartósan fel tud venni a gépünk a névleges teljesítmény leadása esetén, anélkül, hogy túlmelegedne.
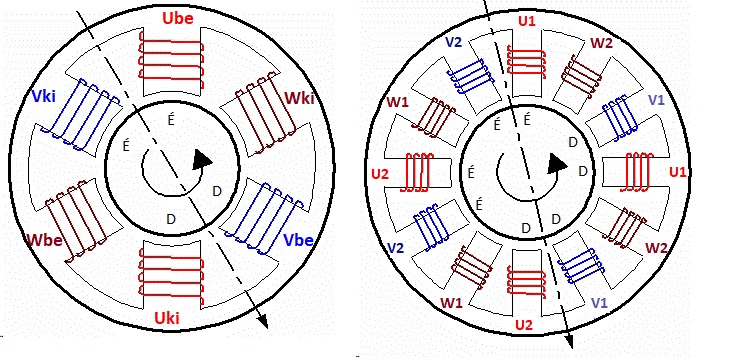 Bal oldalt a kétpólusú, jobb oldalt a 4 pólusú aszinkron motor elvi ábrája.
Bal oldalt a kétpólusú, jobb oldalt a 4 pólusú aszinkron motor elvi ábrája.
Pólusszám - A motorunk állórészébe az áramot tekercselés segítségével juttatjuk be. Ha a tekercselésben áram folyik, akkor az áram folyásirányának (befolyó-/elfolyó áram) megfelelően északi és déli pólus jön létre. A váltakozó áram miatt az egyes tekercsek polaritása folyamatosan változik. Három egymástól villamosan 120 fokkal eltolt fázisban visszük be az áramot a motorunkba, minden fázis csak egy észak-déli póluspárt hoz létre, a motorunk kettő pólusú. Ahogy az elején mondtuk nem csak villamos eltolás van, az egyes tekercsek is 120 foknyira helyezkednek el egymástól.
A gépünk percenkénti fordulatszámához a tápfrekvenciát 60-nal szorozzuk, majd ezt elosztjuk a póluspárok számával. 2 pólusú gép az 1 póluspárt jelet, így 50Hz-es táplálás esetén 3000 mínusz a szlip lesz, például 2845 fordulat/perc. Az elektromos motoroknál nagyobb nyomatékot a pólusszám növelésével kapunk, de ettől lecsökken a fordulatszám, az elérhető legnagyobb nyomaték pedig megnövekszik. Ha minden egyes fázist megduplázunk, akkor négypólusú motort kapunk, 50Hz-es táplálás esetén a fordulatszám 1500-a szlip lesz, például 1470. Az egyes fázisok tekercselései itt már csak 60 fokkal vannak egymáshoz képest eltolva. Videós magyarázat.
Névleges fordulatszám
Az a fordulatszám, ahol a motorunk eléri a legnagyobb teljesítményét. Ettől magasabb fordulatszámra is képes, az elektromos motorok maximális fordulatszámát mezőgyengítéssel lehet elérni.
A fordulatszám [1/perc] mértékegysége helyett már aszinkron gépeknél is meg szokás feleltetni a táplálás frekvenciájának Hz mértékegységét. Egy 50Hz-el forgó motor fordulatszámát 1/perc-ben a pólusszám ismeretében kapjuk meg.
Ez a valóságot jobban közelítő kép egy 4 pólusú aszinkron motor működéséről és a fázisok elosztásáról az állórészben. A zöld, a kék és a piros a három fázisú tekercselés. A pont azt jelöli, hogy éppen felénk folyik az áram, az X, hogy elfelé. A változó nagyságuk a váltakozó áramot szemlélteti. A forgó dolog a forgórész, a lila nyilak jelölik a mágneses fluxust. A kép forrása: imgur.
Ha egy aszinkron gép betápláló kábelét bedugjuk egy háromfázisú konnektorba, akkor egy kezdeti nagy áramlökéssel felgyorsul a hálózati frekvencia közelébe, és a pólusszámának megfelelő fordulatszámmal fog forogni. Ez az áramlökés a motor névleges áramának 6-8-szorosa is lehet. Ez nem szerencsés, ahogy a hajtótengely oldalán megjelenő hirtelen nyomaték sem, ezeket szeretnénk elkerülni. Az aszinkron motorok kisebb árammal történő indítására voltak különféle megoldások, de járművekbe egyik sem volt igazán alkalmas, főleg az egyszerű és finom szabályozhatóság hiánya miatt.
A jó megoldáshoz a váltakozó feszültségünk frekvenciáját is kellene változtatni. De az országos hálózatban a frekvencia mindig 50 Hz körül van, tehát ilyen irányból is problémás, és olyan irányból is, hogy a városi járművek villamos felsővezetékei több szempontból is egyenfeszültségűre épült ki. Ez utóbbi az elektromos járművek szempontjából előnyös, mivel az akkumulátorok is egyenfeszültséget tudnak tárolni. Ebből az egyenfeszültségből kell előállítani a 3 fázisú váltakozó feszültséget.
Mezőgyengítés
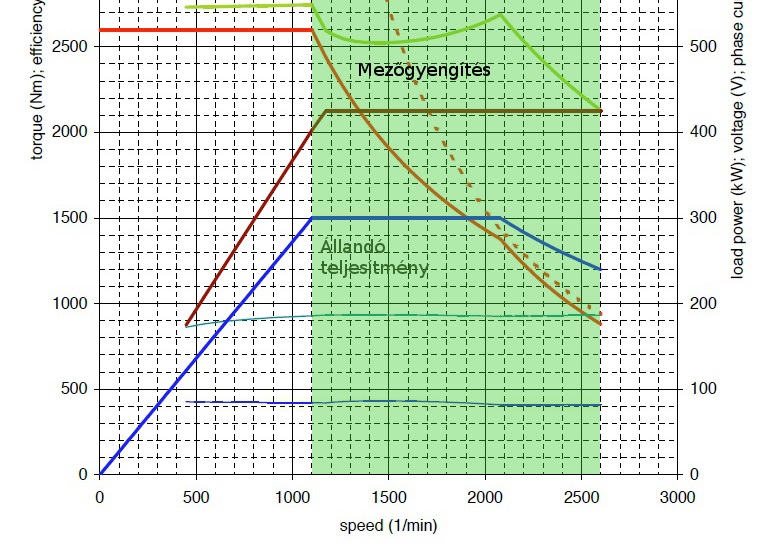 Egy Skoda aszinkron motor jellemzői különböző fordulatszámokon. A piros görbe a nyomaték, a kék görbe a teljesítmény, a zöld mező pedig a mezőgyengített üzem.
Egy Skoda aszinkron motor jellemzői különböző fordulatszámokon. A piros görbe a nyomaték, a kék görbe a teljesítmény, a zöld mező pedig a mezőgyengített üzem.
A villamos gépeknek van egy olyan furcsa tulajdonságuk, hogy a névleges feszültségük elérése után is tudnak tovább gyorsulni, ha a forgást létrehozó elektromágneses mezőt gyengítjük. Ezt az egyenáramú motoroknál az úgynevezett söntöléssel tudtuk elérni. Az aszinkron gépeknél a maximális feszültség elérése után a fordulatszámot a frekvencia növelésével tudjuk növelni. A maximális fordulatszámot és a járművünk végsebességét a motor mechanikus tulajdonságai és a nyomatékcsökkenés fogja főleg behatárolni.
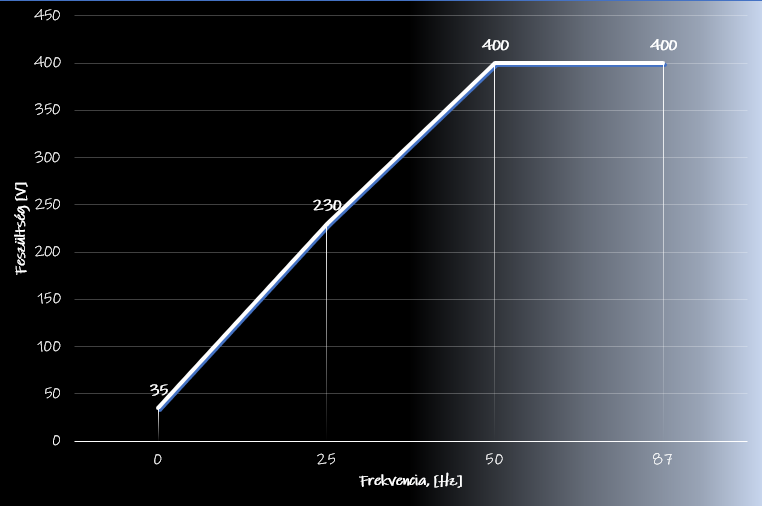
A frekvencia mellett a másik változtatandó mennyiségünk, az elterjedt és ma használatos átalakítókban, a feszültség. Ha a feszültséget és a frekvenciát egymással arányosan növeljük, akkor az aszinkron motorunk fel fog pörögni a maximális fordulatszámára mindenféle áramlökés nélkül. A motor árama ebben az esetben a terhelés függvényében kialakul, az átalakító a feszültség és a frekvencia változtatásával csak korlátozza ezt az áramot.
 Elég sokféle 3 fázisú váltakozó áramú motor fordulatszáma változtatható a feszültség és a frekvencia egyidejű változtatásával.
Elég sokféle 3 fázisú váltakozó áramú motor fordulatszáma változtatható a feszültség és a frekvencia egyidejű változtatásával.
Az ilyen átalakítókat feszültséginverternek nevezzük, ha egyenfeszültségből állítják elő a kimeneti váltakozó feszültséget, és frekvenciaváltónak, ha az 50Hz-es hálózati feszültségből. Kezdetben másféle elven működő áraminvertereket is használtak (Ik 435T, Ganz-Ansaldo motorvonatok), ezek még nem tudták olyan jól kezelni az aszinkron motorokat. Manapság IGBT-félvezetőkből felépített feszültséginvertereket használnak. Nagyobb járművekben 1,5 - 5 kHz-es kapcsolási frekvenciával, autókban 8 - 25kHz-cel szaggatott, váltakozó feszültséget állítanak elő. Csak a szaggatás frekvenciája ilyen magas. A motor tekercselése egy nagy időállandójú induktív terhelés, a szaggatott feszültség időátlaga lesz a motorra jutó feszültség, és ennek az átlagfrekvenciája is jóval alacsonyabb, jellemzően 50 Hz, de 150, 300 Hz-es hajtások is előfordulnak, illetve a repülésben a 400 Hz a használatos.
Inverter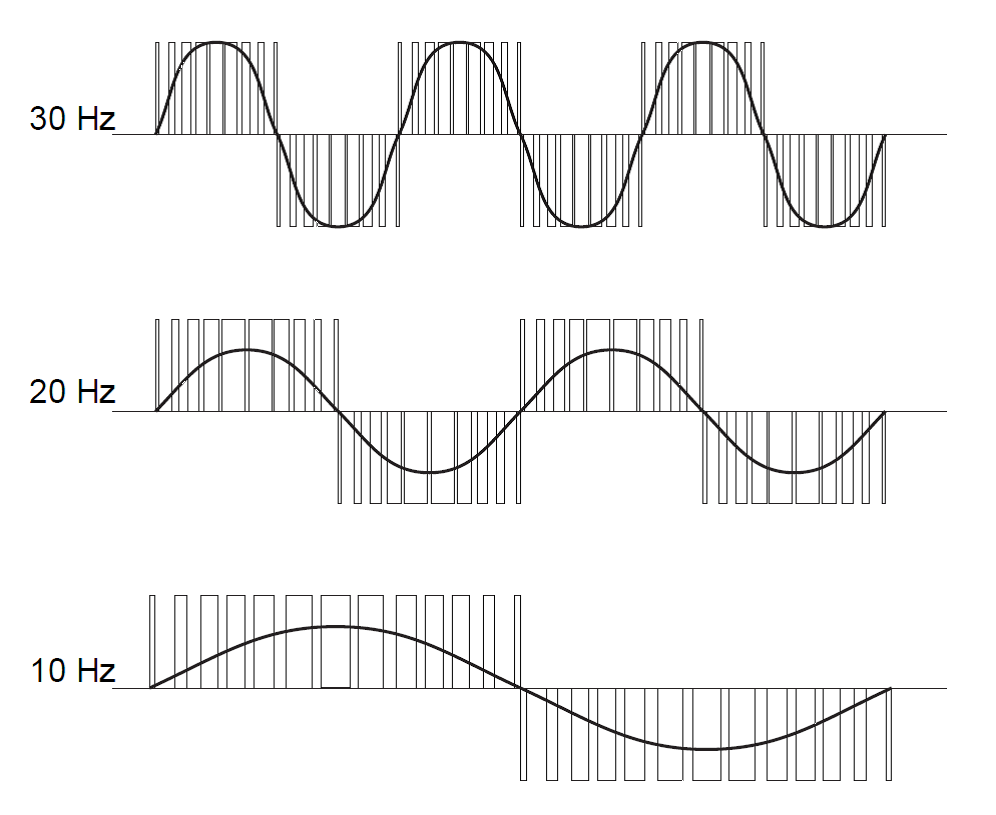 Így készül a szinusz az egyenfeszültségből. A kapcsolási frekvencia a négyszögjelek sűrűségében látszik. a motor fordulatszáma pedig a szinusz frekvenciájával lesz arányos.
Így készül a szinusz az egyenfeszültségből. A kapcsolási frekvencia a négyszögjelek sűrűségében látszik. a motor fordulatszáma pedig a szinusz frekvenciájával lesz arányos.
Az elterjedt inverterekben jellemzően 6 darab, kapcsolóként használt félvezető nagyon gyors kapcsolgatásával állítjuk elő az egyenfeszültségből a három fázisú váltakozó feszültséget. Az inverterek hatásfoka 97-98% körül van. A méret itt is számít, ebben az esetben a kisebb és könnyebb a nyerő. Ehhez az elterjedt szilícium alapú félvezetőket elkezdték lecserélni szilícium-karbid (pl. Tesla Model 3) alapúra, kisebb teljesítményeken pedig egy még jobb tulajdonságokat mutató anyagból, a gallium-nitridből (GaN) felépített MOS-FET félvezető bukkant fel. De ezek a megoldások egyelőre elég drágák.
Hogyan tud hat kapcsoló forgást előidézni?
A kis veszteség ellenére ezeket az eszközöket is illik hűteni, mivel egyre kisebb és kisebb invertereken halad át egyre nagyobb teljesítmény. Az iparban, a trolibuszokon és nagyobb elektromos járművekben szabályozott léghűtésű invertereket használnak, személyautókba (és pár elektromos buszba) a kisebb méret és tömeg igény miatt folyadékhűtésűek kerülnek.
A fejlesztésekben igencsak elöl járó Rimac 1 megawatt teljesítmény leadására képes invertere 37 kilogramm tömegű, míg egy átlagos léghűtéses ipari hajtás hasonló teljesítményű egysége 320-480 kg körül van. De ez csak a motort tápláló inverter, ebben más nincs benne.
Kezd elharapódzni az elektromos autók közt az egyre nagyobb feszültségről működés, töltés és az e köré épített marketing hájp. A hájpnak van jogos alapja, ahogy később látni fogjuk, de az innováció mértékéről pár gondolat az inverterek kapcsán. Az iparban a frekvenciaváltók 400 voltos vagy 690 voltos háromfázisú váltakozó feszültségről működnek, egy-egy széles tartományban. Ebből egyenfeszültséget állítanak elő. Az elsőnek megfelelő egyenfeszültség tartomány a 460-800 V DC, a másodiknak 640V-1100 V DC. Ezekből az egyenfeszültségekből állítják elő az inverterek a kimeneti változó frekvenciájú és feszültségű ismét háromfázisú kimenetet. Ezzel csak azt szeretnénk, mondani, hogy a marketinganyagokban előugró egyre csodálatosabb és csodálatosabb magas feszültségek nem a semmiből jönnek, baromi nagy innováció nélkül is képesek kezelni az elterjedt ipari hajtások is. Tehát még van tér a feszültség növelésére, ha még gyorsabb töltést szeretnénk, az elterjedt és sorozatban gyártott teljesítményelektronika tudja kezelni.
Nézzük meg a trolibuszokon használt egy-két léghűtéses hajtáskonténer tömegét. Ezek a szimpla motort hajtó invertertől a beépített védelmekkel, fojtókkal és a segédüzemi (táp a 24 voltos világításnak, fűtésnek, hűtésnek, légsűrítőnek, szervónak, stb.) inverterekkel többek:
| Hajtáskonténer | Kiepe DPU 409 | Skoda SJ 3.1 | Skoda SJ 4.3 | Medcom FT-160-600 | Medcom FT-160-600 SiC+PSM-42 SiC |
| Trolibusz | Ikarus 412T | Skoda 30 Tr | Skoda 31 Tr | Solaris U/T12 | Solaris U12 e |
| Névl. teljesítmény | 200 kVA | ~160 kW | ~ 250 kW | 160 kW | 160 kW |
| Tömege | 380 kg | 685 kg | 765 kg | 330 kg | 165 kg |
| Megjegyzés | Akkutöltés nincs |
Integrált akku- töltővel |
Integrált akku-töltővel |
Akkutöltő (+kb. 150 kg) és segédüzem (kb. +150-200 kg) nélkül |
Intergrált segédüzemi átalakítóval, akkutöltés nincs |
Ahogy látjuk a szilícium-karbid félvezetős újdonság jóval könnyebb és kisebb is a korábbi szilícium alapú IGBT-vel felépített megoldásoknál. Ha az inverterben megváltoztatjuk tetszőleges két fázis kapcsolási sorrendjét, akkor a motor az ellenkező irányba fog forogni, tehát a rükverchez nincs szükség fordítóműre, áttételekre, hanem ,,szoftverből" megoldható. Ha a motorba bekötött U,V,W fázisokat ebben a sorrendben kapcsoljuk be akkor előre haladunk, ha U,W,V sorrendben, akkor pedig hátra. Ebből az is következik, hogy a hátramenethez szoftveres korlátozás szükséges a maximális sebességhez.
 Medcom FT-160-600 inverter. A buszok, trolibuszok tetejére kerül. (Kép: Medcom)
Medcom FT-160-600 inverter. A buszok, trolibuszok tetejére kerül. (Kép: Medcom)
A feszültség és a frekvencia változtatása más szempontok szerint is előnyös. Az aszinkron gépünk hajt, amíg az állórészre kapcsolt forgómezőnek nagyobb a frekvenciája, mint a forgórésznek. Ha a forgómező frekvenciáját a forgórészé alá csökkentjük, akkor fékezést kapunk, méghozzá visszatápláló fékezést. Mivel a gépünk forgórészében csak fémek vannak, nincs semmiféle gerjesztés, ezért az aszinkron gép táplálását nem célszerű menet közben megszüntetni. A járműhajtások úgy vannak kialakítva, hogy nem is lehet. A motor gyorsan lemágneseződik, ezért hiába forog, nem lesz árama. Ha ez mégis bekövetkezne, akkor úgynevezett repülőrajt funkcióval az inverterek ma már elég gyorsan meg tudják találni, hogy milyen gyorsan forog a motor. Többféle megoldás is van, de jó eséllyel egy kis feszültségű keresőimpulzus által gerjesztett áram hatását érzékelik a különböző fázisokban.
 Járművekbe kerülő, osztrák TSA gyártmányú motor. (Kép: TSA)
Járművekbe kerülő, osztrák TSA gyártmányú motor. (Kép: TSA)
Az alapelv tehát már megvan, a valóság azért ennél bonyolultabb. A járműhajtások alacsony fordulatszámon igénylik a legnagyobb nyomatékot, illetve hirtelen terhelésváltozások is vannak, ezekhez pedig a feszültség-frekvencia egymással arányos változtatása kevés. Ipari szivattyúkhoz és ventilátorokhoz a fenti módszer általában jó, de néha oda is fejlettebb szabályzásra van szükség. A megoldás vagy a mezőorientált szabályozás, vagy a DTC nevű közvetlen nyomatékszabályzás. Ezek kb. egyenértékűek, illetve az idők során a két különféle megoldást ötvözték is, főleg a vegytiszta DTC szűnt már meg.
Ezekkel már megvalósítható a tapadáshatáron történő vontatás, ami vasutas körökből ismerős lehet. A lényege, hogy a kerék (a felhasználó számára) érzékelhető megcsúszása nélkül képes a hajtásvezérlés az éppen elérhető tapadási súrlódást a végletekig kihasználni. A lényeg, hogy a másodperc ezredrésze alatt képesek vagyunk beavatkozni, ez belsőégésű motorokkal nem volt lehetséges. Ez kisebb járműveknél elsősorban korábban nem látott gyorsulási lehetőséget jelent, ami a fékeket használó kipörgésgátlást feleslegessé teheti. A másik lehetőség, ha több motorral hajtunk több tengelyt, vagy akár több kereket, akkor a jármű stabilitásába a vontatással is precízen be tudunk avatkozni. Ez csuklós buszoknál a hidraulikus becsuklásgátlót küldheti nyugdíjba.
Terhelhetőség
 Normál hajtott tengely és villanymotor, ezt hívják centrális elrendezésnek.
Normál hajtott tengely és villanymotor, ezt hívják centrális elrendezésnek.
Az elektromos motorok (és inverterek is) a belsőégésű motorokkal szemben túlterhelhetők. A túlterhelhetőség általában csak rövid ideig igaz, utána a motor csak a névleges teljesítményével terhelhető meghatározott ideig. A túlterhelhetőség mértéke és gyakorisága függ a választott hűtési módtól és a motor felépítésétől. A tengelyre szerelt ventilátoros hűtéssel ellátott ipari motoroknál általában 10 percenként 1 perces vagy 5 percenként 1 perces időtartam a 150-160%-os túlterhelhetőség a megengedett, ami azt jelenti, hogy utána 10 vagy 5 percig nem lehet a névlegestől jobban terhelni.
Az egész kérdéskör azért érdekes, mert a túlterhelhetőség kihasználása elharapódzott, elég extrém mértékben. Olyan motorkonstrukciók is megjelentek, amiknek a folyamatos terhelhetősége csekély, ez hatással van az élettartamukra, javítási gyakoriságukra és a felhasználási területre. Így kisebbek, könnyebbek és olcsóbbak lehetnek a motorok.
 Jóval kisebb a kerékagyba szerelt motor
Jóval kisebb a kerékagyba szerelt motor
Létjogosultsága azért van, mert városi közlekedésnél a motorok csúcsteljesítménye általában nincs kihasználva (lásd Dacia Spring), az indításkor van csak szükség a legnagyobb nyomatékra. De előfordulhat olyan hegyvidéki vonal, ahová egy adott elektromos busz nem tud felmenni, vagy ha igen, akkor jóval lassabban képes csak haladni, mint a dízel. A sajtóközleményekben és a marketing anyagokban sokszor csak a rövid ideig elérhető csúcsteljesítményt adják meg.
Lássunk egy példát:
| Motor | Skoda 4ML3444/K4 | ZF AVE 130 (v1) (1 motor adatai) |
| Névl. teljesítmény (órás) |
160 kW | 60 kW |
| Félóráig elérhető telj. túlterheléssel |
?? | 80 kW |
| Max. teljesítmény (20 mp) | 334 kW | 120 kW |
| Névleges nyomaték | 1800 Nm | 185 Nm |
| Maximális nyomaték | 2280 Nm | 465 Nm |
| Végáttétel | ~9,8 | 22,66 |
A 20 másodpercig elérhető maximális nyomaték azt jelenti, hogy a maximális vonóerő csak addig áll rendelkezésre. Az elektronikus szabályzás megvédi a motort, ezért ha hegynek fel megyünk tömött busszal, akkor több indulás után a kezdeti lendület előbb-utóbb alábbhagy. Tönkremenni tehát nem fog azonnal a motorunk, de jó hatással nem lesz rá a gyakori nagy terhelés, erre a következő részben még visszatérünk.
A ma használt feszültséginverterek már nem feltétlenül igényelnek visszacsatolást a motor tengelyének tényleges forgásáról, belső számításokkal a motor által felvett áramból nagyon jól lehet következtetni a forgórész tényleges lemaradására. Járműveknél a különféle menetstabilitást felügyelő eszközök miatt mégis vannak fordulatszám jeladók, ezért a motorról sem hagyják el, a továbbiakban sem hátrány a meglétük. Mivel aszinkron gépeknél az indítónyomaték is kérdéses volt a korábbi invertereknél, ezért fontos tisztázni, hogy a korszerű hajtások képesek nem csak névleges nyomatékkal indítani egy aszinkron motort, hanem nulla fordulatszámmal is megtartani, mindezt forgómezővel. Mit jelent ez a gyakorlatban? A korszerű hajtásokkal nem érzékelhetünk semmiféle rángatást vagy egyéb anomáliát egy teljes terheléssel, emelkedőn induláskor sem. Mindezt úgy, hogy a motor névleges áramát nem léptük túl. Ha lassú haladáskor vagy óvatos induláskor finom rángatást érzünk, akkor az a hajtásvezérlő még az előző évtized hardverén és tudásán alapul.
Helykihasználás - előnyben a villany!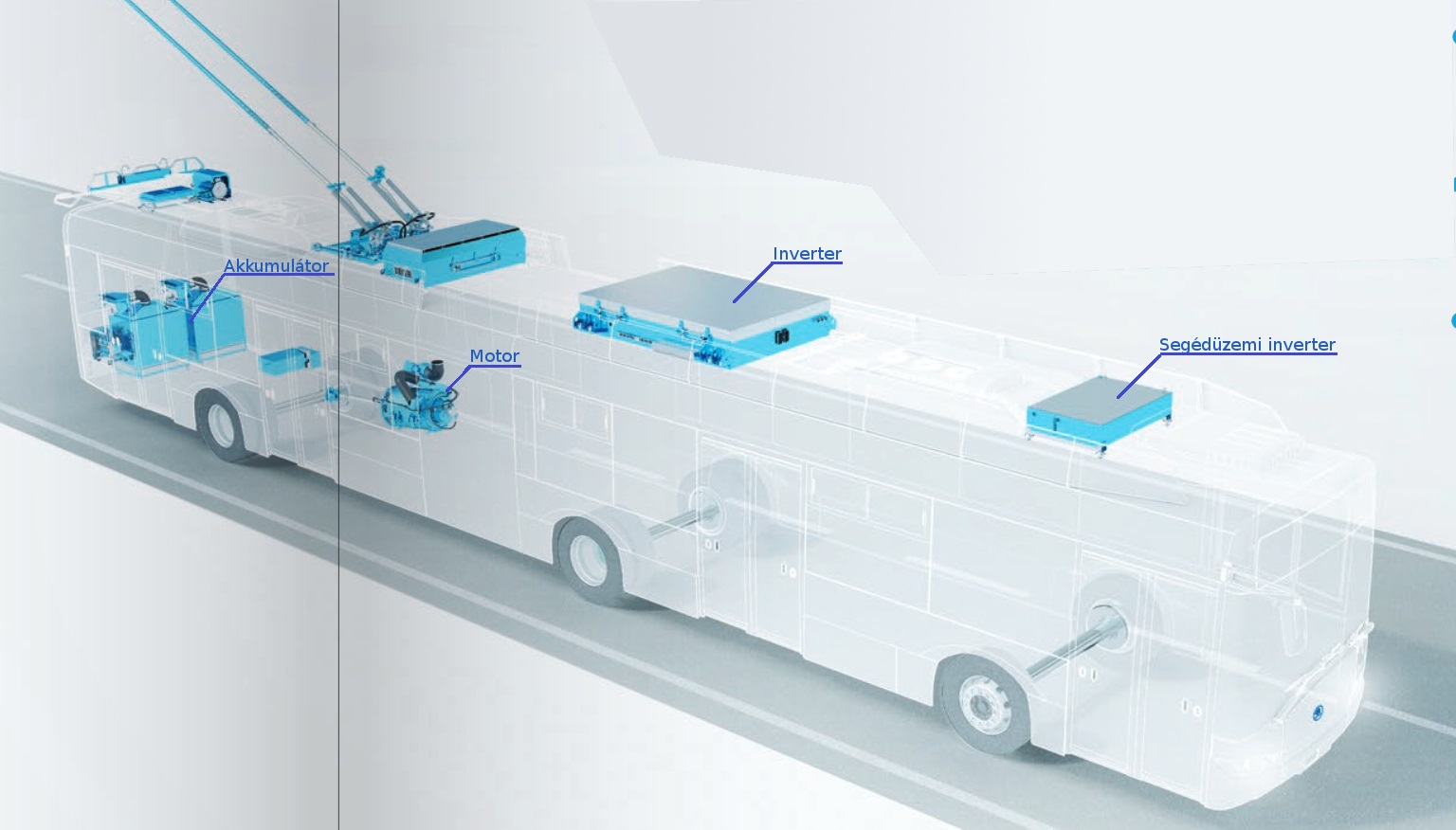 A kép eredetije: Skoda
A kép eredetije: Skoda
Ahogy szigorodnak az emissziós normák úgy foglalnak el egyre több helyet a dízelmotorok a buszokban. Egy ideig csak a nagyobb hűtők jelentettek problémát, újabban már a kipufogógázt utánkezelő (EGR, SCR) rendszereknek is egyre nagyobb helyigényük.
Ezzel szemben az elektromos motor és az inverter nem egy helyre kerül, az inverter nyugodtan kerülhet a buszunk tetejére. Az elektromos motor elhelyezésére is nagyobb szabadságunk van, mint a dízelmotoroknál volt, mivel nincs szükség váltóra és a motor nem is okoz olyan hanghatásokat és rezonanciát. A probléma az akkumulátorokkal van az önjáró trolibuszoknál és az elektromos buszoknál. Nagyon nehezek és sok helyet is igényelnek. Ha esetleg a tetőn kerülnek elhelyezésre, akkor is korlátozzák a buszunk terhelhetőségét, hiába nem látjuk ezeket.
A mikroszámítógépek teljesítményének növekedésével a motor felvett áramát pedig egyre több mindenre lehet használni a korszerű hajtásokban. A villamos jel analízis [1] segítségével, úgynevezett megelőző és előrejelző karbantartási funkciókat is kaphatnak az inverterek, ami egy autóbuszflotta üzemeltetésénél igen hasznos lehet. Az első sorozatgyártásban is ezt használó ipari hajtások például a motorok tekercselésének öregedését tudják előrejelezni. Korábban csak a már bekövetkezett menetzárlatot tudták jelezni az inverterek, most már akár előre, TMK-t is lehet szervezni. A jel analízissel elméletileg még egy sor elektromos és mechanikus probléma is kiszűrhető lenne, például: forgórész excentritás, kiegyensúlyozatlanság, forgórész gyűrű törés/repedés, csapágyhibák, stb. Az egyik kihívás a félvezetők által keltett kapcsolási minta és zaj helyes szűrése úgy, hogy a hibáról árulkodó jelalakot helyesen értékeljük ki. Járművekben a menet közbeni rezgések, visszahatások kiszűrése is egy szép feladat.
Az aszinkron gépek alkonya?
 Ebben a cikkben azt néztük meg, hogy a manapság használt trolibuszok hajtása nagy vonalakban hogyan épül fel.
Ebben a cikkben azt néztük meg, hogy a manapság használt trolibuszok hajtása nagy vonalakban hogyan épül fel.
Mondhatnánk, hogy ugyan már, ennek még nem jött el az ideje, hiszen az újabb elektromos autók közül a Tesla Model S és a Model X is aszinkron motorokat használ, ahogy az Audi e-Tron és a ZF haszonjárművekbe szánt megoldásai is ilyenek. Ezek mellett főleg az szól, hogy gyorsan gyártásba kerülhettek és a hosszú utakon, nagy sebességű haladáskor viszonylag jó a hatásfokuk. Ami mégis ellenük szól, hogy a fokozódó energiahatékonysági elvárásoknak egyre kevésbé tudnak megfelelni. Ahogy a mosógépek, hűtőgépek hatékonyságát szabályozza az EU, úgy az ipari motorokét is. A háztartási gépekből ismerős A+++, A++, A, B, C, stb. osztályok helyett IE5, IE4, IE3, stb. osztályokat használnak. Ezek a szabványok a vontatómotorokra nem érvényesek, helyettük a nehéz akkumulátorok tömegének legalább részbeni kompenzálására lenne szükség a minél jobb hatásfokú és a lehető legkisebb tömegű motorokra. Lássuk mennyit nyomnak a mérlegen a korszerű trolibuszokban használt léghűtéses aszinkron motorok:
| Trolibusz | Skoda Solaris Troliino 12 | Skoda Ikarus Tr187.2 | Cegelec Solaris Trollino 18 |
| Motor | Skoda 4ML3444K/4 | Skoda ML3846/K6 | TSA TME 43-33-6 |
| Üzemel | pl. Budapest | Szeged | Salzburg, Eberswalde |
| Névl. teljesítmény | 160 kW | 250 kW | 250 kW |
| Névl. nyomaték | 1800 Nm | 2600 Nm | 1736 Nm |
| Tömeg | 415 kg | 740 kg | 650 kg |
Egy csuklós autóbuszt hajtó, átlagos hathengeres dízelmotor száraz tömege mindenféle kipufogógáz utánkezelő csodarendszer nélkül 900-1200 kg körül alakul. A korszerűbbekben már 700-860 kg környékén megállnak. Hasonlóan, egy átlagosan elterjedt, a szegedi és egyéb csuklós trolikat is mozgató 6 pólusú aszinkron motor tömege 740 kilogramm. Itt ugyan nincs kipufogógáz utánkezelés, de van inverter ami szintén további tömeg, ahogy fentebb láttuk. A szóló trolibusz esetén már jobb a helyzet, mivel a kisebb dízelmotorok 7-800 kg környékén tanyáznak, a centrális villanymotorunk pedig csak 400 akárhány kiló. A továbbra is nehéz akkumulátorok miatt mégis égető lenne az igény, hogy könnyebbek legyenek az elektromos motorok is. E mellett a hatékonyság fokozása is célunk. A cikksorozat következő részében megnézzük, ezeket milyen műszaki megoldásokkal lehet elérni.
Felhasznált és ajánlott irodalom:
[1] Gyökér Gyula - Dr. Dineva Adrienn - Prof. Dr. Vajda István: A villamos jel analízis eljárás alkalmazása és perspektívái a villamos hajtásrendszerek állapotfigyelésében és diagnosztikájában. Elekrotechnika 2018/12
- Farkas András - Gemeter Jenő - Dr. Nagy Lóránt: Villamos gépek
- Gábor Péter: Villamos vasutak I-II-III.
- Malcolm D McCulloch and Justin D K Bishop and Reed T Doucette - Using electric vehicles for road transport


