
 Egyre több helyen hódít teret az elektromos hajtás. Megnézzük milyen módszerekkel lehet hatékonyabb, kisebb és könnyebb hajtást készíteni.
Egyre több helyen hódít teret az elektromos hajtás. Megnézzük milyen módszerekkel lehet hatékonyabb, kisebb és könnyebb hajtást készíteni.
Az előző epizódokban láttuk, hogy az aszinkron- és a szinkron motorok hogyan működnek. Ahogy azt is, hogy egy trolibuszban tekintélyes helyet foglalnak el az ilyen motorok. Akkor egy akkumulátoros buszban hogyan férnek be akár a kerékagyakba is? Ehhez megnézzük hogyan csoportosíthatók a motorok és milyen műszaki megoldásokkal lehet fokozni a teljesítményüket. Fokozatosan gyakorlatiasabb vizek felé haladunk.
A járműhajtásokban használható teljesítményű villamos motorokban az elektromágneses tér segítségével közvetítjük az állórész és a forgórész között az energiát, amit mozgási energiává fog alakítani a gépünk. Léteznek még ultraszonikus és elektrosztatikus elven működő motorok is. Az előbbiek piezoelektromos elven működnek, például fényképezőgépek optikájában, utóbbiak is csekély teljesítményű, de kísérleti gépek.
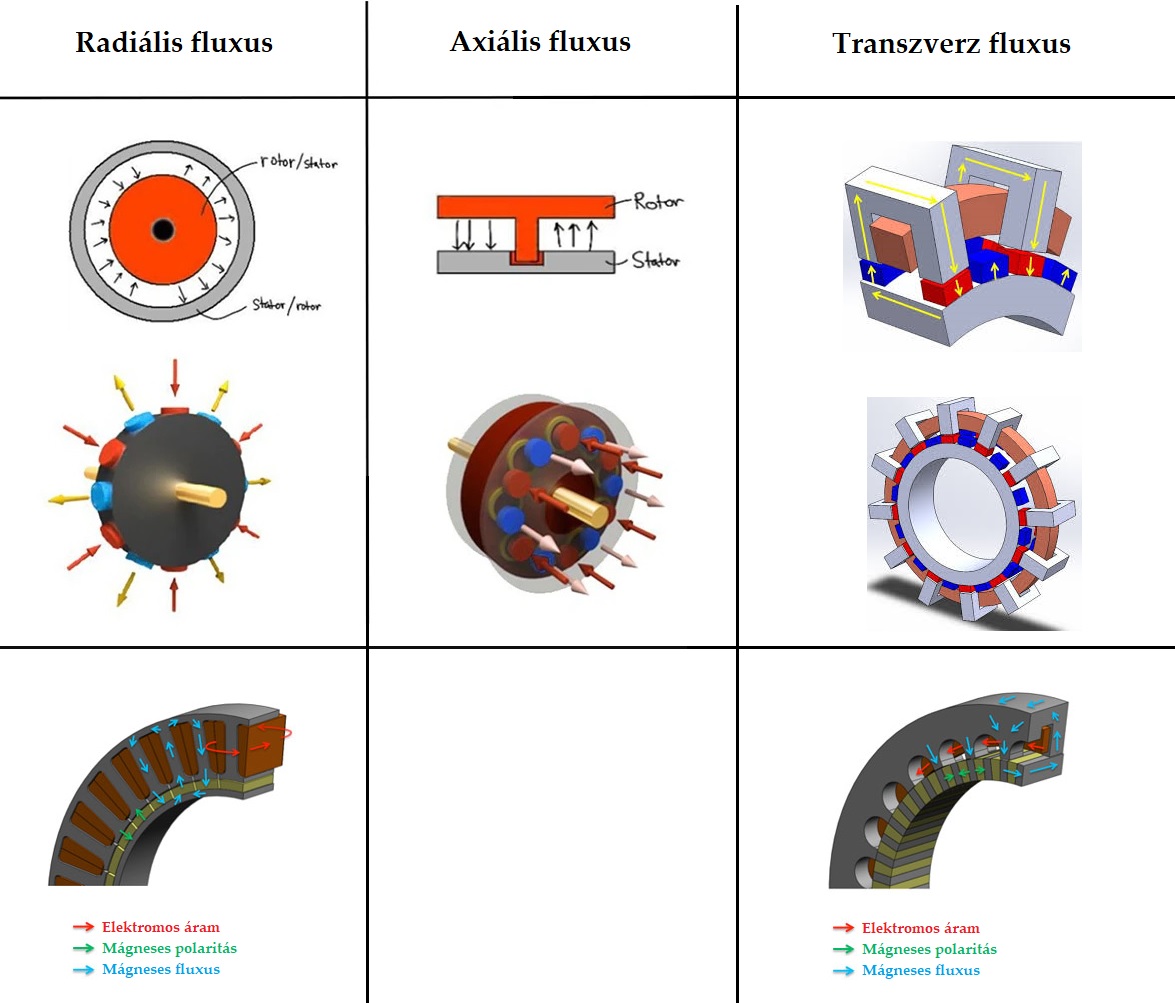
Az elektromágneses erővonalak vagyis a fluxus útja alapján három fő csoportba lehet szétválasztani a motorokat:
- Radiális fluxusú motorok (a fluxus merőleges a gép tengelyére)
- Axiális fluxusú motorok (a fluxus párhuzamos a gép tengelyével)
- Keresztirányú (transzverzális) fluxusú motorok
A villamos motorok eddig használt fajtái szinte kivétel nélkül radiális fluxusú gépek voltak. Az axiális fluxusú motoroknak ígéretes méretbeli, térfogatbeli előnyeik vannak, de nehézkes ezeket legyártani és nincs velük tapasztalat különféle alkalmazásokban. Gondoljunk csak bele, a hagyományos, radiális fluxusú aszinkron gépeket az élet annyi területén használják, hogy még felsorolni is nehéz, csak pár példa: liftek, mozgólépcsők hajtása, irodaházak tetején vagy alagsorában befúvó ventilátorok, klímák kompresszorának hajtása, daruk, olajkutak, vízszivattyúk, hajócsavarok, mozdonyok, motorvonatok, trolibuszok hajtása, satöbbi.
Az axiális fluxusú motorok előnye tehát a kivételesen nagy teljesítménysűrűség, hátrányuk a nehézkes hűthetőség, a bonyolultabb szabályzás és a nehézkes gyárthatóság. Egy axiális fluxusú és kettő hagyományosabb elektromos gép kerül a Ferrari SF90 Stradale autóba. A három motor összesen tud 162kW teljesítményt. Az axiális fluxusú motor teljesítménysűrűsége 14 kW/kg. Nagy terheléshez, nehéz járművekhez tudomásunk szerint jelenleg nem készül ilyen motor. A transzverz fluxusú motorok csak laboratóriumi körülmények között léteznek, nagyon bonyolult és időigényes a gyártásuk, a vezérlésük is komplikált, ezért nem várható az elterjedésük
Külső vagy belső forgórész
 Balra a külső forgórész, jobbra a megszokott belső forgórész (Forrás: Avid Technoilogy)
Balra a külső forgórész, jobbra a megszokott belső forgórész (Forrás: Avid Technoilogy)
A motorok egy állórészből és egy forgórészből állnak. Belső forgórész esetén az állórész házát rögzítjük a járművünkhöz és ebben foglal helyet a tekercselés. Az ebben csapágyakkal megfogatott forgórész csatlakozik akár a kardántengelyhez, vagy akár a kerekekhez és mozgatja a járművüket. A fenti háromféle fluxusképű motor mindegyike készülhet külső vagy belső forgórésszel is. A hagyományos villanymotorok túlnyomó többsége radiális fluxusú és belső forgórészes.
 Kerékagymotorokban kézenfekvő a külső forgórészes motorok használata. (Forrás: e-Traction)
Kerékagymotorokban kézenfekvő a külső forgórészes motorok használata. (Forrás: e-Traction)
A külső forgórészt legegyszerűbben kerékagymotorral lehet elképzelni, amikor is az állórész a kerékagyba van integrálva, a forgórész pedig a keréktárcsába. Hogy bonyolultabb legyen a kép, vannak olyan hagyományosnak tűnő centrális motorok, amik külső forgórészesek. Itt hátrány, hogy a rögzítéshez és a térhatároláshoz nem magát az állórész házát használjuk, hanem a belső állórészhez az egyik végén csatlakozó tokozást. Nem is a tokozás lesz a nehéz, az kb. ugyanaz, hanem a lemezelt állórész vastest megbízható rögzítése.
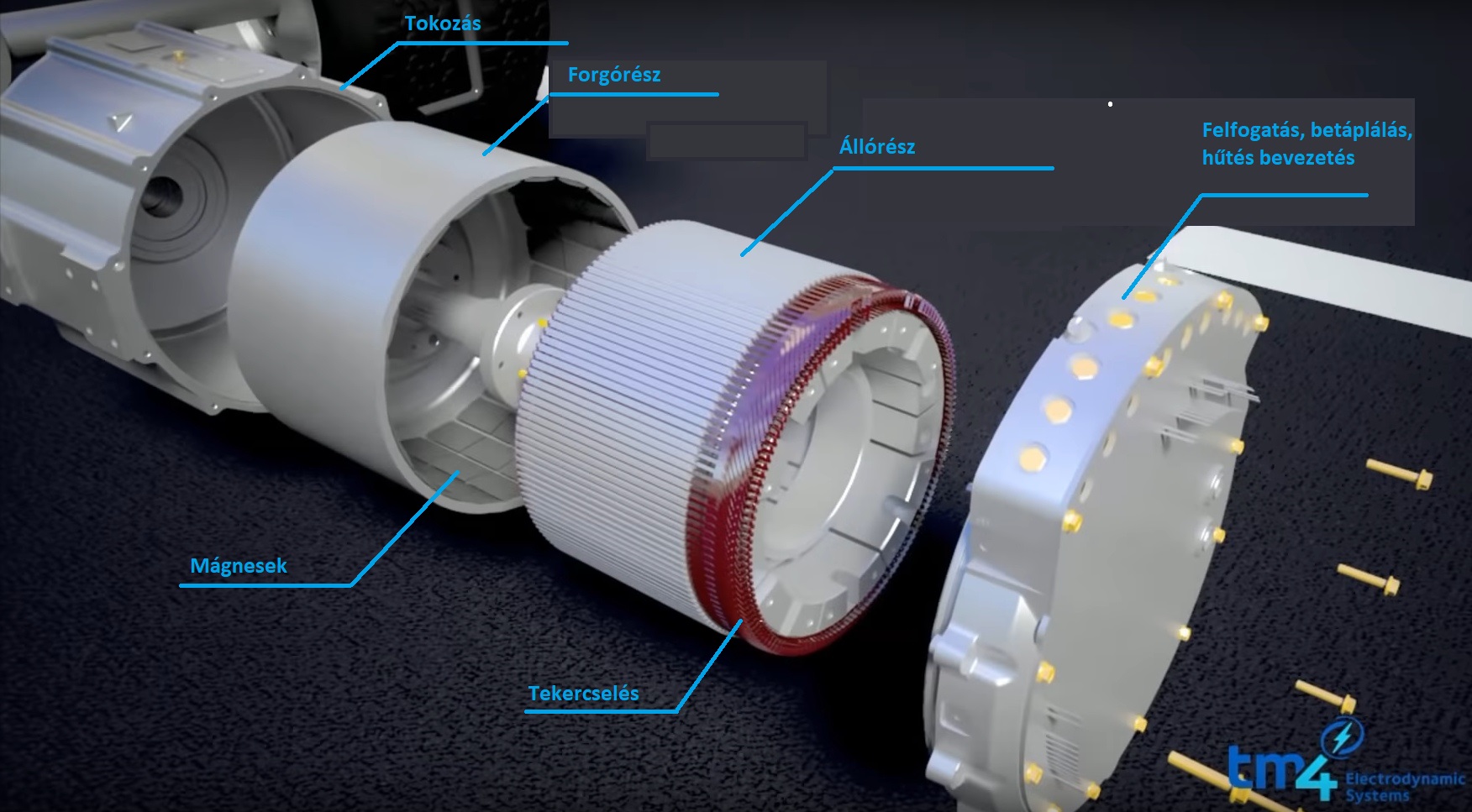 Centrális motor külső forgórésszel. (A kép eredetije: DANA-TM4)
Centrális motor külső forgórésszel. (A kép eredetije: DANA-TM4)
Az ilyen motorok nagy előnye, hogy a nyomatékuk nagyobb, a nagyobb forgórész átmérő miatt, ezzel együtt pedig a forgórész forgási sebessége kisebb lehet. Állandó mágneses motorok esetén a nagyobb kerület miatt több mágnes is elfér, tehát a nyomatékunk ismét csak nagyobb lesz. Külső forgórészes állandó mágneses motort leginkább a forgórész felületére szerelt mágnesekkel (SPM) elképzelni a legegyszerűbb, a mágneseket a forgórész belső felületére ragasztják. Az ilyen motorok fordulatszám tartománya szélesebb lehet a belső forgórészes gépeknél, mert a mágnesekre a forgórész palástjának irányában hat a centrifugális erő. Tehát nagyobb fordulatszám esetén a forgórészpalástról nem lerepülni akarnak a mágnesek, hanem még nagyobb erő préseli oda ezeket. Ettől függetlenül léteznek külső forgórészes motorok beágyazott mágnesekkel (IPM), akár mágnessel segített szinkron reluktancia kialakítással is. 3 fázisú kialakítással a Dana-TM4 és a Danfoss kínál külső forgórészes, nagyobb járművekbe alkalmas motorokat.
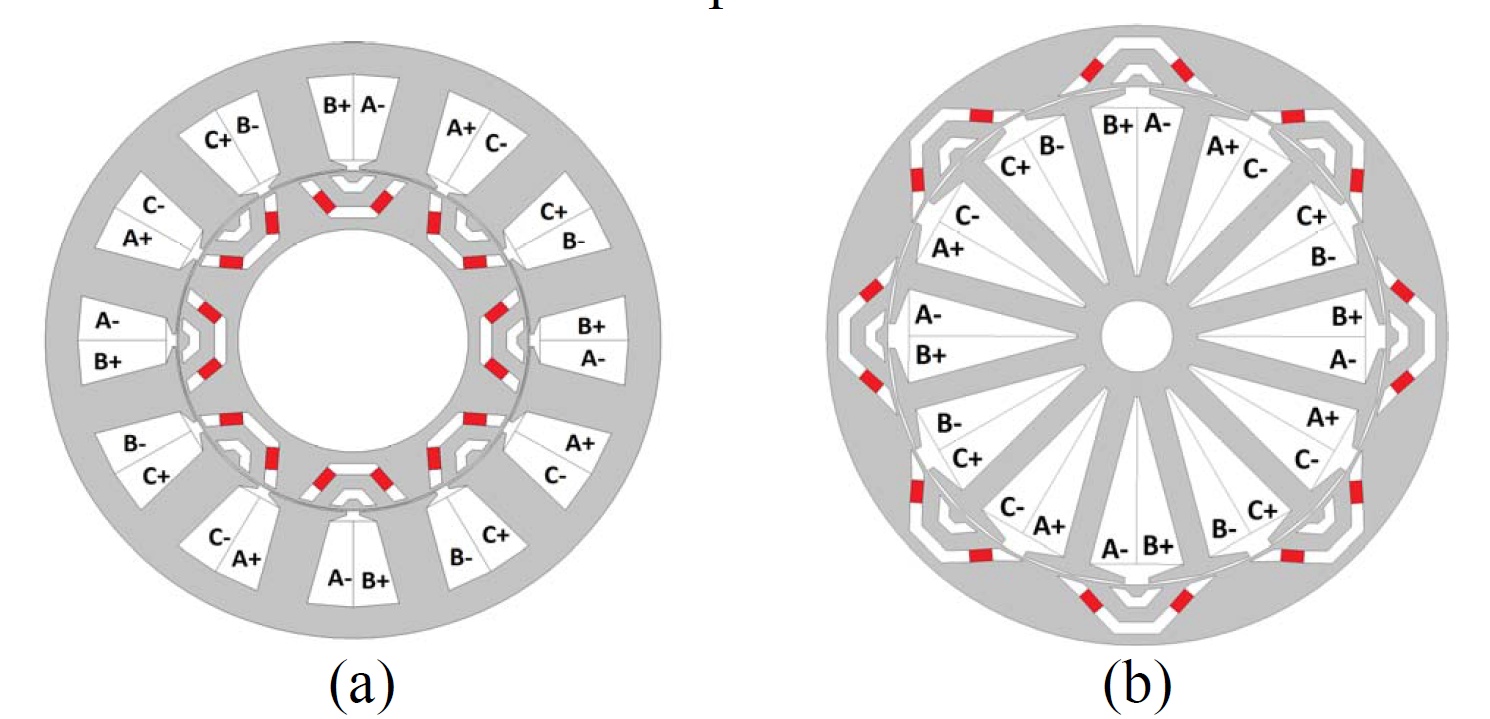 Balra (a) egy belső forgórészes, jobbra (b) egy külső forgórészes mágnessel segített szinkron reluktancia (PMaSynRM) motor. A betűk az állórész tekercseléseket jelölik. (Forrás: [2])
Balra (a) egy belső forgórészes, jobbra (b) egy külső forgórészes mágnessel segített szinkron reluktancia (PMaSynRM) motor. A betűk az állórész tekercseléseket jelölik. (Forrás: [2])
Hátrány, hogy centrális motor esetén külön tokozásra van szükség, és a belső forgórészeshez képest jóval nehézkesebb az állórész hűtése, ami a gép közepén van. A csapágyazás szintén nagyobb igénybevételnek van kitéve. Mégis mire megy ki a játék?
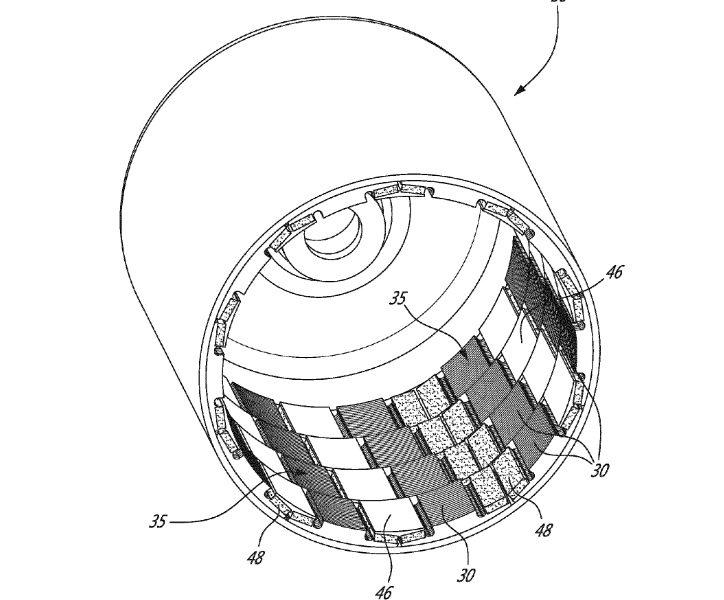 Külső forgórészű IPM vagy PMaSynRM motor forgórésze. A mágnesek csavarvonal menti beépítése a zajt és a nyomatéklüktetést mérsékli (Kép: TM4 szabadalom: US20170040856)
Külső forgórészű IPM vagy PMaSynRM motor forgórésze. A mágnesek csavarvonal menti beépítése a zajt és a nyomatéklüktetést mérsékli (Kép: TM4 szabadalom: US20170040856)
Egy hajtásban vannak mechanikus veszteségek is, még villamos motorokkal is. A szükségeshez képest még a villanymotorok nyomatéka is csekély, és magas fordulatszámon is működnek, ezért ha sebességváltóra nincs is szükség, de egy áttételre (ami akár több áttételt is magába foglalhat) általában szükség van. Ez az áttételnek megfelelően lecsökkenti a fordulatszámot és megnöveli a nyomatékot. Viszont, ha a motorunknak nagyobb a nyomatéka és alacsonyabb a fordulatszáma, akkor ez az egy szem áttétel is elhagyható vagy kisebb módosításúra cserélhető, ami alacsonyabb mechanikai veszteségeket jelent.
Többfázisú motorok
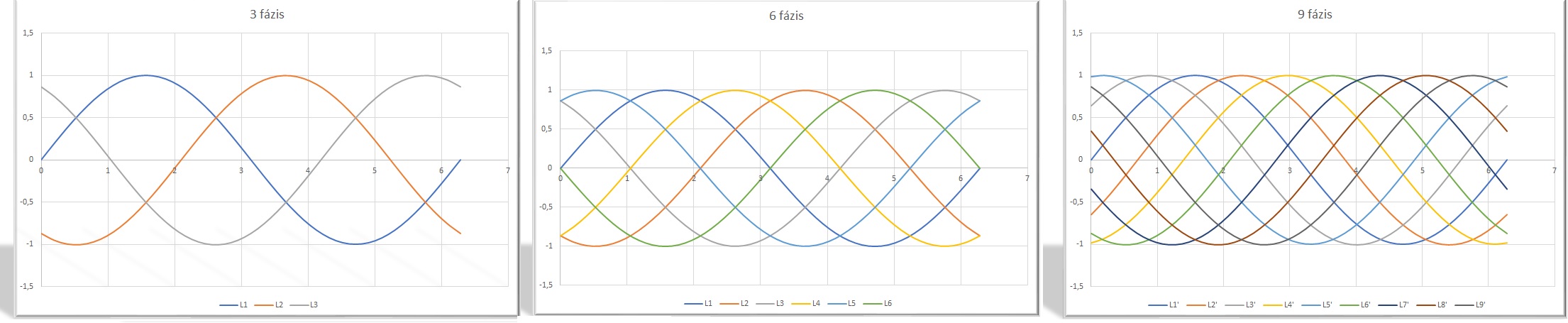 Szimmetrikus három fázis esetén 120 villamos fokkal, 6 fázis esetén 60 fokkal, 9 fázis esetén 40 fokkal egymástól eltoltan követik egymást a fázisok. Azonban ezt így nem nagyon használják.
Szimmetrikus három fázis esetén 120 villamos fokkal, 6 fázis esetén 60 fokkal, 9 fázis esetén 40 fokkal egymástól eltoltan követik egymást a fázisok. Azonban ezt így nem nagyon használják.
A három fázisnál több fázist használó elektromos gépeket értjük ide. Több megawattos tartományban, hajókhoz és erőművekben kezdték el ezeket a megoldásokat használni. A járműhajtások piacán is van jelentős súlyú piaci szereplő (DANA-TM4 Sumo termékcsalád), aki akár 6, akár 9 fázisú motorokat, és ezekhez invertereket is kínál. Az ilyen motoroknak nagyobb a teljesítménysűrűségük, kisebb a nyomatéklüktetésük. Több fázisú aszinkron gépeknek jobb a hatásfokuk, ez állandómágneses szinkron motoroknál nincs így feltétlenül, speciális kialakítás kell hozzá. A meghajtó inverter egy félvezetője kisebb áramot visz, mintha csak 3 fázisú lenne azonos teljesítménnyel. Előfordulhat az is hogy a 100 kW-os inverter félvezetőit használják a 160 és a 250 kW-os inverterekben is, csak éppen duplán és triplán. Több kábelre van szükség az inverter és a motor között, de egy kábel keresztmetszete kisebb lehet. A több, kisebb kábel ugyan problémás lehet, ha a kábelezés hosszú, de könnyebb és olcsóbb, mint 3 nagyobb keresztmetszetű kábel. A több kábel vesztesége viszont magasabb.
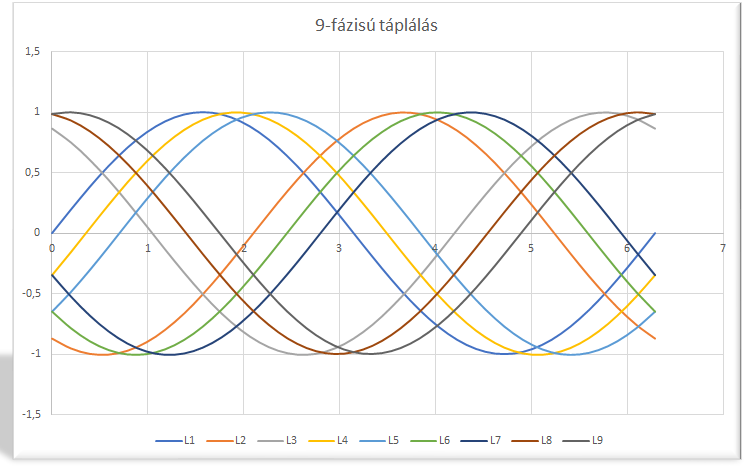 Elterjedtebb a 3 fázisú rendszerhez képest 15-30 fokkal eltolt többi fázis.
Elterjedtebb a 3 fázisú rendszerhez képest 15-30 fokkal eltolt többi fázis.
Az ilyen inverterek visszahatása az egyenfeszültségű oldalra kisebb, ez az akkumulátoroknak kedvező. Az inverter és a teljes hajtás hibatűrése is jobb lehet, ha a motor és a hajtás felépítése lehetővé teszi a következőket: Egyrészt a motor miatt, ha az egyik tekercselésben menetzárlat keletkezik, akkor az a 3 fázis kiesik, de a másik 3 vagy 2-szer 3 fázis még működhet. A másik ok az inverter, ha az egyik ágon az egyik félvezetőben hiba keletkezik, akkor (ha olyan a hiba) ugyanúgy a még elérhető 3 fázis(ok) leértékelve mozgásképesen tudják tartani a járművet.
A villanymotorok túlnyomó többsége viszont továbbra is belső forgórészes és 3 fázisú váltakozó árammal működik, legyen bármilyen is a működési elve.
Állórész tekercselés
Napjaink nagy sztárja a marketing anyagokban a hajtű tekercselésnek mondott lemezelt állórész tekercselés. Az áramot a motorba nem hagyományos szálas réz vezetőkön visszük be, hanem lemezelt réz vezetőkön. A hagyományos tekercseléstől jobb a kihasználtsága. Ezzel alacsonyabb tekercshőmérséklet, nagyobb teljesítmény érhető el, ugyanakkora motor esetén. Ha két azonos, de eltérő állórész tekercselésű állandó mágneses motort egymás mellé rakunk, akkor a hagyományos tekercseléshez képest a lemezelt tekercseléssel 27%-kal nagyobb nyomatékot, és 37%-kal nagyobb teljesítményt tudunk elérni.
Nem új találmány, nem ismeretlen, eddig szimplán csak nem érte meg ezzel a megoldással gyártani az ipari motorokat sem, a kisebb darabszámban készülő vontató motorokat pedig még úgy sem. Az autógyárak a hatótávolságért folyó küzdelemben viszont nem sajnálják a pénzt, illetve egy-két speciális hegesztéstechnika bevezetése sem riasztja el őket. Ez a fajta tekercselés bármelyik eddig bemutatott motor állórészébe bekerülhet.
Hűtési mód szerinti csoportosítás
A villamos gépeket is szokás hűteni, mivel ezeknek is vannak veszteségei, még ha jóval kisebbek is, mint a belsőégésű motoroknak. Megfelelő hűtés nélkül a villamos gépünk tekercselése hamarabb tönkremenne, zárlatos lenne, illetve a belsőégésű motorokhoz hasonlóan a hőhatás miatt deformációk lépnének fel. A jól kiválasztott hűtés és üzemi hőmérséklet a motor hatásfokát is az optimális tartományban tartja. Ahogy melegednek a vezető anyagok, úgy növekszik az ellenállásuk és a veszteségük. A motorok tekercselését szigetelik, a szigetelésnek az élettartama ökölszabály szerint minden 10 fokos üzemi hőmérséklet emelkedésre feleződik és viszont, minden 10 fokos csökkenésre duplázódik. Ha a tekercselés szigetelése az élettartama végére ér, akkor a motort hajtó inverter fáziszárlat vagy földzárlat hibával azonnal megáll és nem megyünk tovább. Ezért nem mindegy, hogy mennyire ,,kiélezett" motort (túlterhelések) használunk egy adott feladatra.
Hűtési módok:
- Léghűtés
- Folyadékhűtés
- Víz-glikol
- Olaj
- Hűtőközeges
A legelterjedtebb hűtési mód a léghűtés. Ennek is több fokozata van, az ipari motorokban a gép saját tengelyére szerelt ventilátor hűti a motorok túlnyomó többségét. A hagyományos trolibuszokban ez is előfordulhat, de inkább az jellemző, hogy egy különálló kis motor fújja a levegőt a hajtó motorba, mivel a gyakori indítások-lassítások miatt a tengelyre szerelt hűtés változó fordulatszáma (gyakori leállása) már nem feltétlenül elegendő.
Az újonnan érkező elektromos autók és buszok már folyadékhűtéses motorokat használnak. Ezek sem ismeretlenek, hajókban és speciálisabb ipari alkalmazásokban eddig is léteztek. A léghűtéses motorokhoz szokott trolibusz- és villamos műszakiaknak ez felesleges bonyolításnak és karbantartási nehézségnek tűnhet, azonban egy belsőégésű motor hűtési köréhez hasonló és jóval kisebb teljesítményre méretezik ezeket.
Pár pont, ami miatt a folyadékhűtés a járműhajtásokban terjed:
- A folyadékhűtéssel jobb hatásfok érhető el
- A motorok térfogata kisebb lehet
- A motorok teljesítménysűrűsége jelentősen javul
- A választott hűtési mód hatással van a rövid idejű túlterhelhetőségre és a tartós teljesítményre is
- Az állandó mágneses motorokban a mágnesek hőmérséklete egy bizonyos értéket nem léphet túl
Például ha választunk két ipari aszinkron motort azonos teljesítménnyel, akkor a folyadékhűtéses 25%-kal kisebb méretű lesz a léghűtésestől. A folyadékhűtés az esetek túlnyomó többségében az állórészház és a vastest közé köpenyszerűen bevezetett hűtést jelent. Ha nagyon nagy teljesítményre van szükségünk a motortól, akkor a hűtését is tovább lehet fokozni.
Az aszinkron motorokban jelentős veszteség keletkezik a forgórészben. Ezt a folyadékhűtéses motorok többségénél belső levegőkeringetéssel kezelik (pl. ZF AVE 130), de ha a motorból még több teljesítményt akarnak kicsikarni, vagy esetleg hosszasan fenntartani a csúcsteljesítményt, akkor szükség van a forgórész folyadékhűtésére is. Például a Tesla a Model S-be és Model X-be szerelt aszinkron motoroknál a forgórészt is folyadékkal hűti. A forgórész tengelye üreges, ebben keringtetik a hűtőfolyadékot. Jó pár éven át a Teslának az aszinkron motorjaik hűtőköre komoly gondot okozott, tele van az internet az egyik rövid élettartamú szimering hibája és a tökéletlen állórészház kialakítás miatt tönkrement motorok cseréjével. Hasonló, de remélhetőleg időtállóbb hűtést használ az Audi e-tron aszinkron motorja is. Egyéb elven működő motorok forgórészében jóval kisebb veszteség keletkezik, ezért nincs szükség ilyen kényes hűtési módra,
A Tesla Model 3 állandó mágneses szinkron motorjai esetén már nincs szükség a forgórész hűtésére. Ez kevesebb hibalehetőséget és egyszerűbb gyártást is jelent.
A folyadékhűtés másik ága az olajjal hűtés. Belsőégésű motorokból ismerős lehet, hogy az olajjal is lehet hűteni. Mivel az olaj fajlagos hőkapacitása csak kb. fele a vízének, ezért ez a vízhűtéses köröktől elvileg egy kisebb hatásfokú történet. Viszont az olaj villamosan szigetel, ezért bonyolult tömítések és egyéb cifraságok nélkül is lehet használni akár a villamos gép belsejében is, így már nem olyan rossz. Például a víz-glikol köpenyhűtésnek hátránya, hogy az állandómágneses gép belseje felé, ahol a hőre érzékeny mágnesek vannak, növekszik a hőmérséklet. Ezért az állandómágneses gépek tekercselésének vagy a forgórész belsejének olaj-sugár vagy olajpermet hűtése létező megoldás, ez utóbbit a Scania is használja az elektromos városi buszában. Kevésbé kihasznált gépek olaj köpernyhűtéssel is készülhetnek, ha az olaj úgyis rendelkezésre áll a környező részegységek kenéséhez, hűtéséhez, pl.: áttételek, váltók, kompresszorok.
Az inverterek fejlődése
A motorokat vezérlő inverter méretét és tömegét is nagyban meghatározza a választott hűtési mód. Válasszunk invertert a ZF kerékagymotoros portáltengely hajtásához! Mit ajánl a Medcom léghűtéses kivitelben és mit a ZF folyadékhűtéses kivitelben?
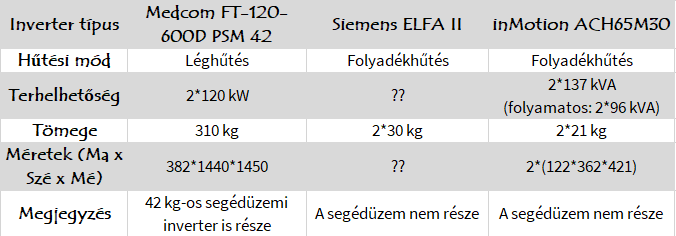
Az előző részben láthattuk, hogy a szilícium-karbid félvezetőkkel is sokat lehetne faragni az inverter tömegén. De a hagyományos szilícium IGBT-k sem halottak még. Az IGBT-éknek hét generációjuk van, az elterjedten használt a negyedik és a hatodik. A hetedik generációs félvezető használatával is jelentős tömeg és hely takarítható meg, miközben az inverter vesztesége is alacsonyabb lesz.Költséghatékony a hibrid felépítésű félvezető is, itt csak a visszáram dióda készül szilícium-karbidból, a kapcsolóelem hagyományos. Tehát a léghűtéses inverterek is tudnak még kisebbek és könnyebbek lenni, úgy, hogy közben az áruk sem száll el.
A cikkben szereplő egy-két elektromos buszban is nézzük meg, hogyan alakul a hozzájuk tartozó inverterek tömege, a folyadékhűtéssel mit értünk el az első részben látott, több száz kilós trolibusz hajtáskonténerekhez képest: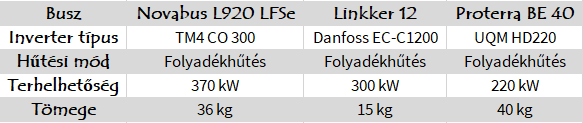
Egy trolibuszhoz hálózati védelmek, zavarszűrők is kellenek, tehát nehezebb lesz a történet, de a megszokott hajtáskonténerek tömege bőven csökkenthető lenne meglévő technikákkal.
A folyadékhűtés következő lépcsője, a hűtőközeggel hűtés. Nem csupán víz-glikol keveréket keringetünk a rendszerben, hanem hűtőközeget, kompresszorral. Így a motorunkat még jobban tudjuk hűteni, terhelni, kisebb és könnyebb lehet úgy, hogy közben erősebb és egzotikus helyekre sem kell a hűtést elvezetni, tömítésekkel bajlódni.
A Tesla Model Y-ban láthatunk még egy említésre érdemes, egészen elképesztő mértékben átgondolt és megvalósított példát. A hőszivattyús hűtő-fűtőkör két részre van osztva, köztük az átjárást az ocotovalve nevű, változtatható útvonalú szelep biztosítja. A folyadékhűtéses motor, inverter és akkumulátor hűtőköre hőcserélőkön keresztül kapcsolódik a hőszivattyús utastér temperáláshoz, de a hőáramlási irány az octovalve segítségével variálható. A hajtásláncban keletkező veszteségeket képes felhasználni akár az utastér, akár az akkumulátor temperálására, vagy képes akár a hőszivattyúval is fűteni az akkumulátort, például gyorstöltés előtt. Egyetértünk Elon Musk-kal, ennek a létrehozása valami olyan mérnöki teljesítmény, amit ritkán lát az ember. Egy három részes videósorozat a működéséről:
Elosztott hajtásrendszer
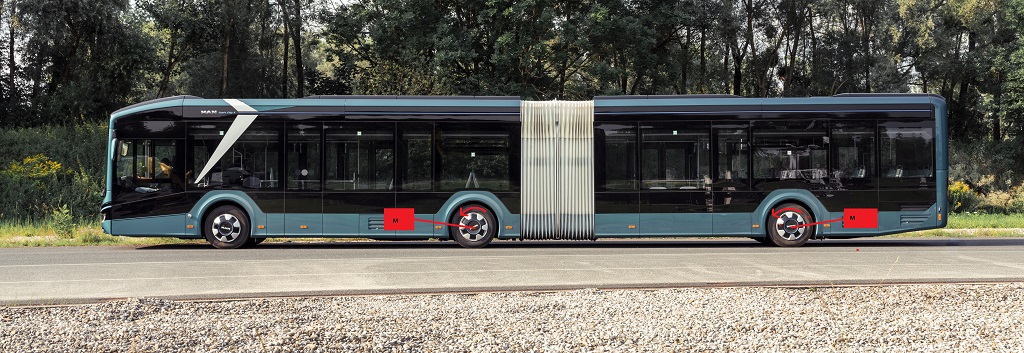 Elosztott hajtásrendszer centrális motorokkal. MAN Lion's CIty 18E.
Elosztott hajtásrendszer centrális motorokkal. MAN Lion's CIty 18E.
A méretcsökkentés másik módja az elosztott hajtásrendszer. Ez a vasúttól, a mozdonyos szerelvényeket leváltó villamos motorvonatokról ellesett megoldás. Az elektromos motorok nagyon szépen tudnak szinkronban járni, precízen szabályozhatók, a jármű segédüzemeinek pedig nem fontos a közelükben lenniük. Ezért megtehetjük, hogy a járművünk hajtásához szükséges erőt nem egyetlen motorból nyerjük, hanem több kisebből. Ez csuklós vagy duplacsuklós buszok esetén jöhet szóba. A több motor teljesítménye összeadódik a talajon. Így csökken a tengelyek terhelése, és azonos gyorsuláshoz az úttestre jutó pontszerű vonóerő is kisebb induláskor, az aszfaltburkolatoknak ez nem mindegy a nyári melegben.
 Nem öncélú a sok hókuszpók. Balra az egyetlen tengelyt hajtó aszinkron motor helyigénye, jobbra az elosztott hajtásrendszerben dolgozó állandómágneses szinkron motor helyigénye.
Nem öncélú a sok hókuszpók. Balra az egyetlen tengelyt hajtó aszinkron motor helyigénye, jobbra az elosztott hajtásrendszerben dolgozó állandómágneses szinkron motor helyigénye.
Centrális a motorunk, ha valami hasonló a hajtásnak az elrendezése, mint a belsőégésű motorok esetén. De ebből is lehet több is egy járműben. Tehát centrális a motor, ha differenciálművön keresztül, kardántengellyel hajt. Akkumulátoros buszok esetén több centrális motort először az MAN csuklósán láthatunk. Az egyes tengelyekre eső vonóerő azonos gyorsulás esetén kisebb, nehezebben pörög el a kerék, mintha a teljes nyomatékot egy tengelyen vinnénk át az útra. Ez generátoros fékezéskor is igaz, azonos lassulás esetén egy kerék blokkolása később következik be. Ezeket a dolgokat tudják Svájcban is, a HESS trolibuszok és elektromos buszok már jó ideje ezért készülnek dupla motorral.
6x2 helyett 6x4 Az összkerékhajtás jó dolog csúszós úton és télen, de miért is? Az elérhető legnagyobb gyorsulás és lassulás a következő képlettel írható le:
Az összkerékhajtás jó dolog csúszós úton és télen, de miért is? Az elérhető legnagyobb gyorsulás és lassulás a következő képlettel írható le:
amax=±μ*β*g
A μ a tapadási súrlódási együttható, a β a tapadási arány, a g pedig a nehézségi gyorsulás (9,81 m/s2). A tapadási tényező az útviszonyoktól és a sebességtől függ. A tapadási arány megadja, hogy a jármű tömegének hányad része jut a hajtott tengely(ek)re. Nincs benne sem motor teljesítmény, sem vonóerő, nem véletlenül, ez az elérhető legnagyobb érték, ha a motorerőnket korlátlanul nagynak vesszük.
Ha a hajtott- és a nem hajtott tengelyek arányát változtatjuk, akkor a tapadási arányunk változik. Ha minden tengely hajtott, akkor a β=1, ha a kettőből csak az egyik hajtott, akkor β=0,6-0,64, ha háromból egy tengely hajtott, akkor a β=0,4-0,45.
Haszonjárműveknél nem szeretjük, nem gazdaságos az összkerékhajtás. Ha az útviszonyok miatt kisebb a tapadási súrlódás, akkor jól jönnek a plusz hajtott tengelyek. Így nagyobb lesz az adott útviszonyok mellett elérhető maximális gyorsulás és motoros lassítás, ez utóbbi esetünkben a visszatápláló fékezések miatt is számít.
1,2 m/s2-nél nagyobb gyorsulást nem szeretünk buszoknál, nézzük meg mi a helyzet különböző útviszonyoknál. Ha száraz az út akkor a μ 0,7-0,9 körül van, ha vizes, akkor 0,4-0,6 körül, ha havas akkor 0,25 körül. Egy tengelyen hajtott csuklós buszunk van, száraz útra 3,1 m/s2 körüli maximális gyorsulást kapunk álló helyzetből, vizes útra kb. 1,9-es értéket, havas útra pedig 0,9-es értéket, tehát már el fog pörögni a kerék, ha intenzíven szeretnénk gyorsítani. Az 1,2 m/s2-nél nagyobb értékeket ha gyorsítás során nem is tudjuk kihasználni, de lassításkor, vészfékezéskor rákényszerülhetünk. Ha havas úton két tengelyen hajtunk, akkor 0,9-es elérhető maximális gyorsulás helyett 1,47-et kapunk, tehát nem fogunk csúszkálni induláskor.
A beépített motorok terhelésére nem feltétlenül a legjobb módszer az 50-50 %-os elosztás. Inkább a szükséges teljes nyomaték 65-70 százaléka jusson egy motorra. Látszólag lesz kettő, túlméretezett motorunk, de jó okai vannak ennek. Az egyik ok, hogy ha a motorok bármelyike kiesne, akkor a jármű mozgásképessége minél inkább biztosított maradjon. A másik ok, hogy a motorok terhelése sem fele-fele egy jól átgondolt hajtásvezérléssel. Hajtáskor érdemes a középső tengelyt jobban hajtani, fékezéskor pedig a hátsó tengelyt erősebben fékezni, illetve az aktuális tengelyterheléshez is alkalmazkodni. Erre még visszatérünk. A harmadik ok, hogy így a 12 méteres szóló buszban használt motor újból felhasználható. Ez előnyös a javítás, és a tartalék alkatrészek számát tekintve, és a gyártáskor is.
Megvalósítani a terheléselosztást aszinkron gépek esetén szlipkompenzációval lehet, szinkron gépek esetén a terhelési szög beállításával. A szlipkompenzáció: egyenes vonalú, egyenletes haladás esetén mindkét tengelyen azonos a fordulatszám és a motorjaink is azonos fordulatszámmal forognak. Az ennek megfelelő villamos frekvencia legyen mondjuk 62 Hz. Az erősebben hajtó motort pl. 64 Hz-es frekvenciával kell táplálni, a kevesebb nyomatékot biztosítót pedig 63 Hz-cel.
Hátrány, hogy a differenciálmű megmarad, ez helyigényben és a hajtás hatásfokában is kedvezőtlen. Hacsak nem önzáró a differenciálművünk (amire buszoknál is van példa), akkor a tapadási határ a teljes tengelyen a hamarabb megcsúszó kerék esetén következik be, tehát a légfékkel beavatkozás megmarad, mint elsődleges kipörgésgátlás. Hátrány még a nagy helyigény az utastérből, de óriási előny a jól hozzáférhető felépítés és az egyszerű karbantartás.
 Elosztott hajtásrendszer kvázi kerékagymotorokkal, Mercedes eCitaro G. Itt ez csak opciós lehetőség.
Elosztott hajtásrendszer kvázi kerékagymotorokkal, Mercedes eCitaro G. Itt ez csak opciós lehetőség.
A hajtásrendszerünket úgy is eloszthatjuk, hogy nem kardántengelyen át hajtjuk meg a hajtott tengely differenciálművét centrális motorral, hanem minden egyes hajtható kerék kap egy önálló motort. Így a kardántengely és a differenciálmű elhagyható, a kerékagymotorok pedig vagy egy áttétel csoporton vagy közvetlenül hajthatják meg az egyes kerekeket. Ami áttételen keresztül hajt, az csak kvázi kerékagymotor, de a marketing anyagok ezt is annak mondják, a valódi kerékagymotorok nem használnak áttételt. Az áttételen át hajtó kerékagymotor teljesen zárt lehet, valamivel így védettebb, mint az áttételt nem használó, közvetlenül a keréktárcsába szerelt rokona.
Tömegadatok egy hagyományos és egy kvázi kerékagymotoros hajtáshoz:
- Hagyományos hajtáslánc: ZF AV 133 hátsó híd: 973 kg + a motor, ami akár 740 kg is lehet.
- ZF kvázi kerékagymotoros (AVE 130 vagy újabban AxTrax AVE) megoldás: 1220 kg
Tömegben tehát nagyon jók vagyunk ha egy kerékagymotoros tengelyünk van, és helyigény terén is, nincs szükség külön a motor elhelyezésére, ami alacsonypadlós buszok utasterének kialakításánál nagy előny. Tömegben addig vagyunk jók, amíg a motor 247 kilónál nehezebb. Nagy előny a kerekenkénti nyomatékszabályzás megléte is, ez kipörgésgátlásban, blokkolásgátlásban és stabilitás programban is nagy segítség lehet, első körös beavatkozásnak egy határig előléphet a motorok nyomatékának változtatása.
 Valódi kerékagymotor az e-Traction megoldása
Valódi kerékagymotor az e-Traction megoldása
A kerékagymotorok hátránya, hogy a korlátozottan rendelkezésre álló hely miatt erősen ki vannak használva és ennek megfelelően erőteljes hűtés biztosítása is a feladat. Ez azt jelenti, hogy az elérhető legnagyobb nyomaték (vonóerő) és teljesítmény csak rövid ideig áll rendelkezésre. Ez városi buszokban nincs is messze az igényektől, mivel csak a megállóból elindulás idejére van szükség a legnagyobb nyomatékra. Egészen addig, amíg sík a terep... Mechanikus szempontból hiába hagyjuk el a differenciálművet, a kvázi kerékagymotoroknál jókora módosításra van szükség ahhoz, hogy használható nyomatékot kapjunk. Ezt többfokozatú áttétellel érik el, aminek a hatásfoka pocsék.
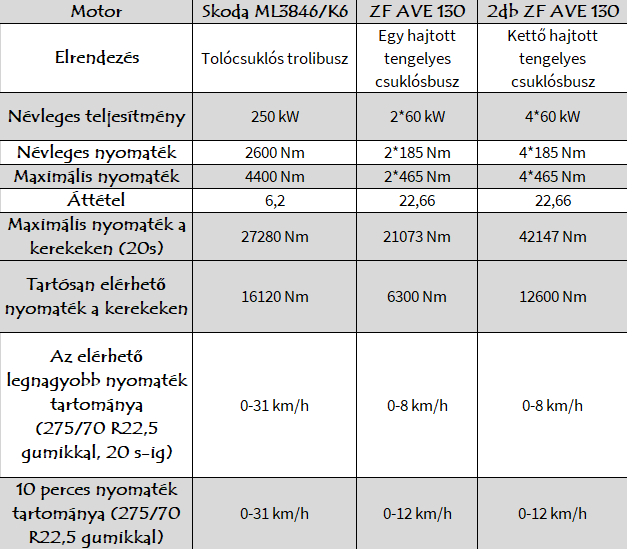
Lássuk a számokat! Zárójelben az egy tengelyre érvényes adatok. Az éta (*η) a hajtómű hatásfokát jelöli, ami 0,91-0,96 körül lehet.
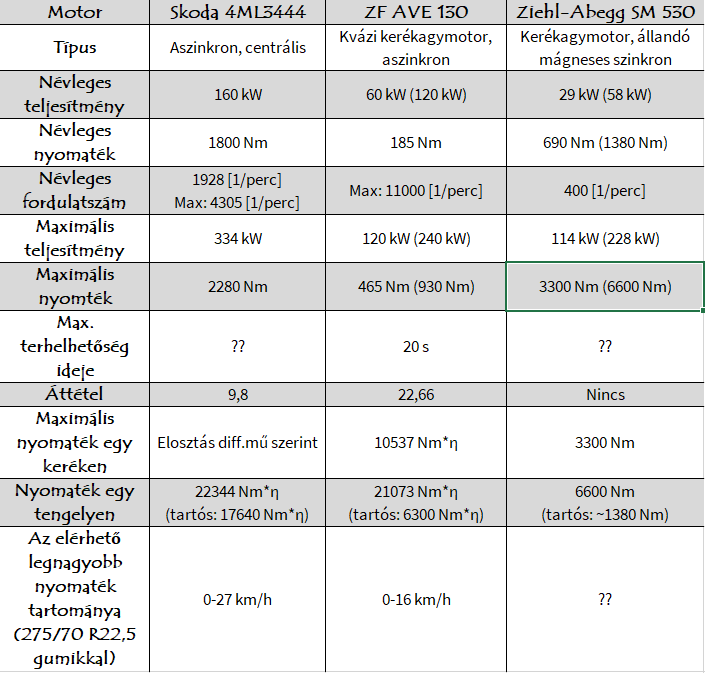
Érdekesek ezek az adatok. Azt tudjuk, hogy az elektromos motorok névleges nyomatéka gyakorlatilag nulla fordulatszámtól elérhető. Ez a megfelelő áttételek után a kereken vonerőként jelentkezik, ezért a táblázat utolsó sorát akár úgy is elnevezhettük volna, hogy az indítási vonóerő milyen sebesség tartományban érhető el. A nyomatékok nagyságával talán nincs különösebb baj, mivel a legnagyobb nyomatékokra induláskor van szükség, ezen gyorsan túljuthatunk. Akkor merül fel kérdés, ha a forgalmi szituáció nagyon sok indítást kényszerít ki, emelkedőn. Az elérhető legnagyobb nyomaték lehet jól néz ki sík terepre, de mivel csak jóval kisebb tartományban áll rendelkezésre, ezért érdemes elgondolkodni, hogy mennyire fontos az összes adat vagy inkább a teljes fordulatszám tartományban a nyomatékgörbék ismerete.
Illetve marketing anyagok alapján ne állítsuk már, hogy a 11 ezer és a ki tudja mekkora Nm nyomaték, az hű és ha, mert nem hű és ha, meg kellene kérdezni, hogy hol annyi a nyomaték. Nézzük meg csuklós buszokra is mi a helyzet!
Az elérhető legnagyobb vonóerő tartománya befolyással van a jármű dinamikájára, azaz hogyan képes tartani a menetrendet. Minél szélesebb tartomány, annál jobban tudja tartani a járművünk a menetrendet. A korszerű trolibuszt látjuk, de hasonlítsunk össze egy Ikarus-GVM trolibuszt is, az egy- és a kettő tengelyen, kerékagymotorokkal hajtott elektromos buszokkal. Hogyan is alakul az elérhető legnagyobb vonóerő száraz úton? Az összehasonlítás picit sántít, mert a GVM trolibusz még jóval könnyebb volt a mai csuklósoknál. A GVM üres tömege kb. 14 tonna, megengedett össztömege 23,8 tonna, a motorjának tartós teljesítménye 196 kW, legnagyobb teljesítménye 250 kW, legnagyobb nyomatéka 1935 Nm. Egy korszerű troli vagy akkumulátoros csuklós saját tömege 18-20 tonna körül mozog, legnagyobb össztömege 28 tonna.
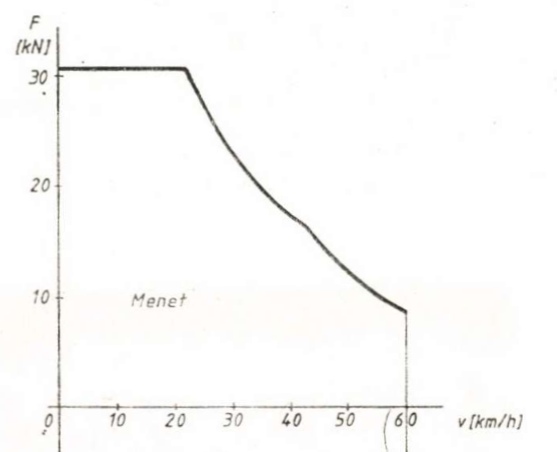 Az Ikarus-GVM trolibusz vonóereje. Forrás: [1]
Az Ikarus-GVM trolibusz vonóereje. Forrás: [1]
Egy kerékagymotoros hajtott tengellyel (a legnépszerűbb, kvázi kerékagymotoros) az elérhető legnagyobb vonóerő 43,5 kN, de ez csak 20 másodpercig és 8 km/h-ig elérhető. A 10 percig elérhető legnagyobb vonóerő 31 kN, de csak 12 km/h-ig áll rendelkezésre. A félórás terhelhetőség már csak 23 kN és meredeken csökkenő karakterisztikája van 0-tól egészen 18 km/h-ig is, ahogy a tartósan elérhető 17,5 kN is meredeken csökkenő tendenciát mutat. Ezeknek az adatoknak hegymenetben van jelentősége, mivel akkor a legnagyobb terhelésén működik a motor, nem biztos, hogy van idő a visszahűlésre és ezzel nem lehet a legnagyobb vonóerővel számolni egy újabb induláskor, csak az alacsonyabb értékekkel. Kettő hajtott tengellyel már jobb a helyzet. A legnagyobb vonóerőnk 87 kN, de 20 másodpercig és 8 km/h-ig. A 10 perces érték 60 kN és egyenes a karakterisztikája 0-tól 12 km/h-ig, a félórás 46 kN, a tartós pedig 34 kN.
 A kerékagymotoros hajtott tengely kisebb helyigénye látszik a képen. A bal oldalt a járóközbe benyúló valami a hagyományos tengely differenciálműve. (Kép: ZF)
A kerékagymotoros hajtott tengely kisebb helyigénye látszik a képen. A bal oldalt a járóközbe benyúló valami a hagyományos tengely differenciálműve. (Kép: ZF)
Tehát jobb lenne kettő kerékagymotoros tengely egy csuklós busz tartós, dinamikus mozgatásához vagy éppen hegyvidéki közlekedésre. Alacsonyabb lesz így is a tömege a hagyományos hajtásohoz képest? Nem, mert 2500 kg-ot nyom a mérlegen, míg a hagyományos elrendezés egy jó nehéz aszinkron motorral is csak 1713 kg.
A kerékagymotorok további hátránya a karbantarthatóság. Ha a motorban meghibásodás történik, vagy csapágyat kell cserélni, az nem egyszerű feladat. A marketinganyagok szólamait egyelőre fogadjuk el, még visszatérünk erre. A másik nagy hátrány a rugózatlan tömeg drasztikus növekedése. Ez a futómű alkatrészeire (lengéscsillapítók, légrugók, lengőkarok, stb.) kedvezőtlenül hat, rossz útfelületen pedig a jármű vázszerkezetére is.
Méretezés
Az előző két részből már láttuk, hogy az aszinkron motorok hatásfoka részterhelésen alacsony. Akkor a belsőégésű motorok terén szerzett tapasztalatokhoz hasonlóan mi lenne, ha a motorunkat az optimális üzemi ponthoz minél közelebb használnánk? Azaz a kis motor sokat üzemel hatékony régióban, nagy teljesítménnyel. Az elfogadható élettartamhoz erős hűtés, leginkább folyadékhűtés dukál. A kicsi és könnyű motorunk leginkább nagy teljesítményű és csekélyke nyomatékú, tehát vagy fix áttételt vagy sebességváltót használnak.
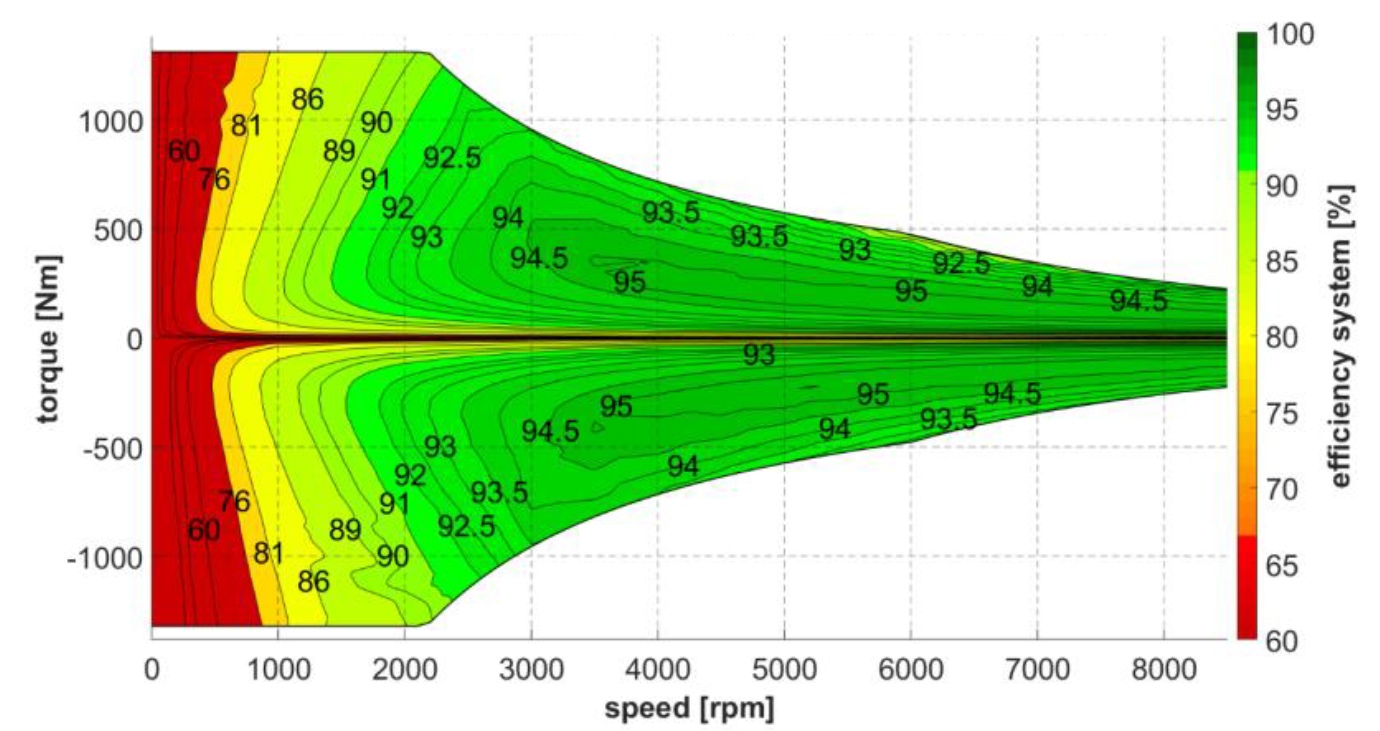 A ZF CeTraxx hajtásának hatásfok térképe. Látszik, hogy igazán jó hatásfoka csak nagy fordulatszámokon van (Forrás: ZF)
A ZF CeTraxx hajtásának hatásfok térképe. Látszik, hogy igazán jó hatásfoka csak nagy fordulatszámokon van (Forrás: ZF)
A ZF CeTraxx villamos motor egy áttétellel egybeépítve kapható, a 3,36-os módosítású áttétel történetesen az egyik EcoLife automata váltó első fokozata. Az AxTrax kvázi kerékagymotor pedig kétfokozatú, fix áttételt használ a teljes, 22,66-os nyomatékmódosításhoz. Az első fokozat módosítása 3,895, a második bolygóműves fokozaté pedig 5,818.
Váltó
 (A kép forrása: Volvo)
(A kép forrása: Volvo)
Na álljunk meg egy szóra! Nem arról volt szó, hogy villanymotornál elhagyhatjuk a nyomatékváltót, akkor most ez megint micsoda? A jó öreg váltó mégiscsak jól jön, ha kevesebb kompromisszumot akarunk kötni. A belsőégésű motorokkal nem lehet nyomatékváltó nélkül járművet hajtani, elektromos motorral lehet, de most kezdenek rájönni, hogy váltóval még ez is hatékonyabb. Jellemző a kettő fokozat, de négy- és hatfokozatú megoldás is létezik. A váltó hatásfoka sem 100 %, de jó hatásfokú váltók is készülnek, a váltógyárak sem akarnak éhen halni a nagy haladás közben.
Azt már láttuk, hogy a motorunk legnagyobb nyomatéka a pólusszámától függ. Ha nagyobb nyomatékot akarunk, akkor a motor névleges fordulatszáma lecsökken. Azaz jól gyorsulunk, de a végsebesség csekélyke lesz, ez ismerős. A pólusszám növelésének számtalan nyűgje van, bonyolultabb lesz a tekercselés, nagyobb, nehezebb a motor. Vagy külső forgórész kell, több fázisú táplálás, ez pedig drága, kevés vele a tapasztalat. Az axiális fluxusú motoroknak nem csak a gyártásuk bonyolult, de a hajtáslánchoz illesztésük is. Ezért a hagyományos villanymotorok túlnyomó többsége radiális fluxusú, belső forgórészes és 3 fázisú táplálású és ez valószínűleg így is marad egy darabig.
Ezért a váltókat általában a végsebesség, és az indítónyomaték növelésére, és egyben a hatékonyság növelésére is használják, a nagyobb fordulatszámra optimalizált motorokhoz. Miért is kell nekünk nagyobb nyomaték? Prémium személyautók esetén fejletépő és versenyképes gyorsuláshoz és ezzel egyidejűleg a vállalható végsebességhez, lásd Porsche Taycan. A váltó beépítésével kiiktathatjuk a szélsőségesen bonyolult motorhűtést (lásd Tesla), ami mint láttuk, hibaforrás is lehet. Buszok esetén könnyebb, kisebb, nagyobb fordulatszámra optimális motorok nagyobb indítónyomatékához, azaz egyben jobb hegymászási képességekhez, nagyobb végsebességhez és jobb gyorsulás eléréséhez használhatunk váltót.
 Az első Tesla Roadsterekben is kettő fokozatú váltó volt (Forrás: Wikipédia)
Az első Tesla Roadsterekben is kettő fokozatú váltó volt (Forrás: Wikipédia)
A váltó használata nem újdonság, nem a Porsche találta fel a meleg vizet. Az első említésre érdemes elektromos autó, amiben váltó volt, az a Tesla Roadster. Több beszállítónak is beletört a bicskája a kétsebességes szerkezet megbízható legyártásába, ezért 2008 végétől a Roadster és később a többi modell is váltó nélkül, egyfokozatú áttétellel készült. Azt láttuk, hogy az elektromos motoroknak nagyon jó a hatásfoka, és hatékonyabb motorokat is tudunk választani. De azt is láttuk, hogy a legmagasabb hatásfok tartomány nem mindenütt áll rendelkezésre. Kézenfekvő tehát nyomatékváltót használni, és a motort a lehető legmagasabb hatásfok tartományban járatni a váltó segítségével. Kettő fokozatú váltóval így 5-9% körüli, 3 vagy 4 sebességes váltóval 9-15% körüli hatékonyság növekedés várható. Kettő fokozatú váltót az elektromos motorok nagy nyomatékára nem egyszerű jól gyártani (lásd Tesla Roadster), de egyre több személyautóban várható a megjelenésük.
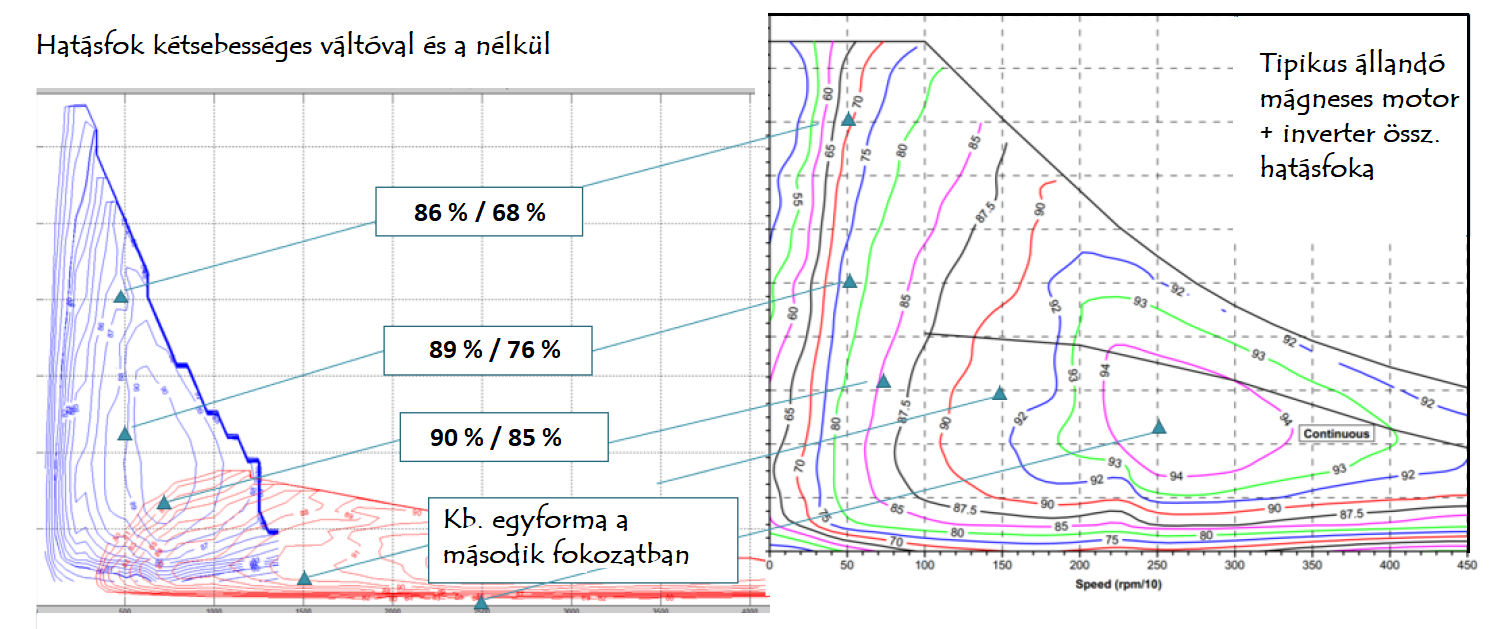 Motor hatásfokok 2 fokozatú váltóval és váltó nélkül. Nagy fordulatszámokon fordul a helyzet.
Motor hatásfokok 2 fokozatú váltóval és váltó nélkül. Nagy fordulatszámokon fordul a helyzet.
Nem csak a hajtás, hanem a visszatáplálás során is előnyös a váltó megléte, a fenti megtakarítások úgy jönnek ki, hogy a fékezés során is vannak kapcsolások.
Buszok terén Európában először a pici dízel- és pici villanymotorral (I-SAM: 90 kg, 70/120-150 kW, 400/800 Nm) szerelt Volvo hibrid buszok elektromos mozgatásához használták ki a sebességváltó előnyeit A Volvo a teljesen elektromos buszához már egy nagyobb elektromos motort használ, de a sebességváltó megmaradt, 12 helyett már csak 2 fokozattal. Ahogy a komolyabb teljesítményű Scania városi busz motor is, itt gyaníthatóan a gyérebben lakott északi tájakra kifutó elővárosi járatokra a magasabb fordulatszámokon is hatékony hajtás indulási nyomatéknövelése volt a cél.
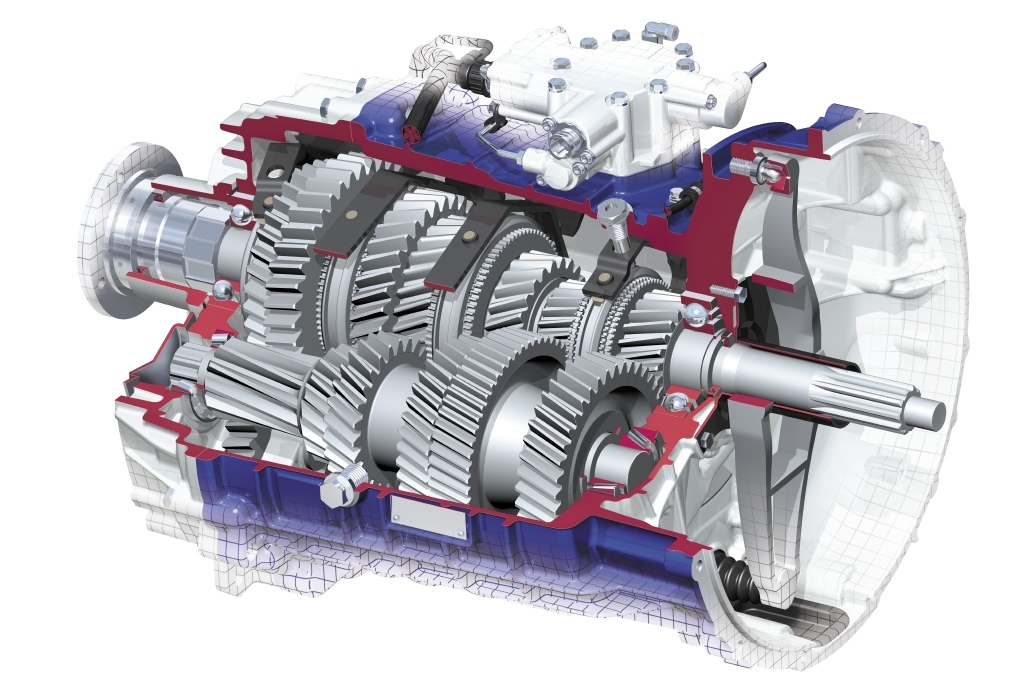
 Két motor, összegző-mű, kétfokozatú sebességváltó. Ez kerül a Volvo elektromos csuklósaiba. (Kép: Volvo)
Két motor, összegző-mű, kétfokozatú sebességváltó. Ez kerül a Volvo elektromos csuklósaiba. (Kép: Volvo)
A Volvo elektromos szóló buszaiban egy 200 kW csúcsteljesítményű és 425 Nm legnagyobb nyomatékú állandó mágneses szinkron motort használ. Ez kerül az FL teherautókba is, csak más áttételekkel. Csuklós buszokba és az FE teherautókba ugyanez a motor kerül, csak duplán, és összegző-mű is kerül még a váltó és a motorok közé. A motorka névleges teljesítménye hol 165, hol 130 kW-nak van feltüntetve, érdekesség, hogy a csuklós buszhoz csúcsteljesítménynek 2*200 kW-ot adnak meg, félórás teljesítményre pedig csak egyszer 170 kW-ot... A szólóbusz kerekein 19 ezer Nm legnagyobb nyomatékot adnak meg, a csuklósnak 31 ezret, reméljük kerekítések nélkül. Mindezt csak rövid ideig, ha feljebb görgetünk, akkor látjuk, hogy a szóló értéke még így is soványka, a csuklósé pedig szódával elmegy. A hajtáslánc teljes nyomaték módosítása az első fokozatban 44,7 körül van, a csuklósnál 36,4 körül. A mechanikus hatásfokba pedig belegondolhatunk: összegző-mű, váltó, differenciálmű...
 Az új Scania Citywide (Kép: ABB)
Az új Scania Citywide (Kép: ABB)
A Scania folyadék- és olajpermet hűtésű állandó mágneses szinkron motorja 295 kW csúcs- és 220 kW tartós teljesítményt tud leadni. Nyomatékra 2100 Nm-es legnagyobb és 1300 Nm-es tartós értéket adtak meg, kérdés, hogy a motor egybe van-e építve egy áttétellel vagy áttétel nélkül tudja ezeket a nyomatékokat. Mindenesetre a kapcsolódó kétfokozatú váltó 37 km/h környékén vált.
 Proterra BE40 (Fotó: Altoona-.test)
Proterra BE40 (Fotó: Altoona-.test)
Váltós megoldásokat kínál a ZF mellett a Dana, és az Eaton is. A dán Danfoss tulajdonába került amerikai UQM ez utóbbi beszállító megoldását használja. A Proterra buszokban alkalmazott hajtás az Altoona-teszten is szerepelt, össze is tudunk hasonlítani pár elektromos busz hajtásláncot.
Az Altoona-teszt
Itthon sem ismeretlen a teszt, az egykori Ikarus és az ottani utód, a NABI észak-amerikai szereplése miatt. 1989-ben hozták létre a tesztközpontot Pennsylvania államban, a Szövetségi Közlekedési Hatóság támogatásával. Céljuk a buszok tesztelése biztonság, szerkezeti merevség, megbízhatóság, szervizigény, menetteljesítmények, fogyasztás, károsanyag kibocsátás és zaj tekintetében. A mért adatok publikusan elérhetők és össze is hasonlíthatók: http://apps.altoonabustest.psu.edu/ Az egykori Ikarus és NABI tesztek eredményei is elérhetők.

Vannak rövid és teljes tesztek, újabban a rövid tesztek az elektromos buszok energiafogyasztására kihegyezve. A teljes teszt félmillió mérföldet és 12 éves élettartamnak megfelelő terhelést takar. Meghibásodások vannak, ezeket szépen dokumentálták is, a különböző típusok összehasonlítása már az olvasó dolga.
Minket most az energiafogyasztás érdekel.A régebbi tesztekben ez a SAE J1376 szabvány szerinti mérésekkel történt. Ez ülő utasos terheléssel a BAC-nek (Business-Arterial-Commuter, azaz városi-elővárosi és helyközi) is nevezett ciklus így tevődött össze:
A városi ciklus CBD (Central Business District):
Az elővárosi (Arterial):
A helyközi vagy ingázó (Commuter):
A teljes mérési ciklus városi-szünet-elővárosi-városi-elővárosi-városi és ingázó üzemódokból áll, 2830 másodperc az időtartama, 22,53 kliométer a teljes megteendő távolság, 55 mérföld/óra (88,5 km/h) a legnagyobb sebesség. A teljes ciklusban az átlagsebesség 28,9 km/h.
Újabban a SAE J 1634-2017 szabvány szerint történik a mérés, ez a valóságot jobban közelíti. A tesztelés a járművel ülő utasos terheléssel, a következő ciklusok szerint történik:
1. HD-UDDS ciklus (helyközi)
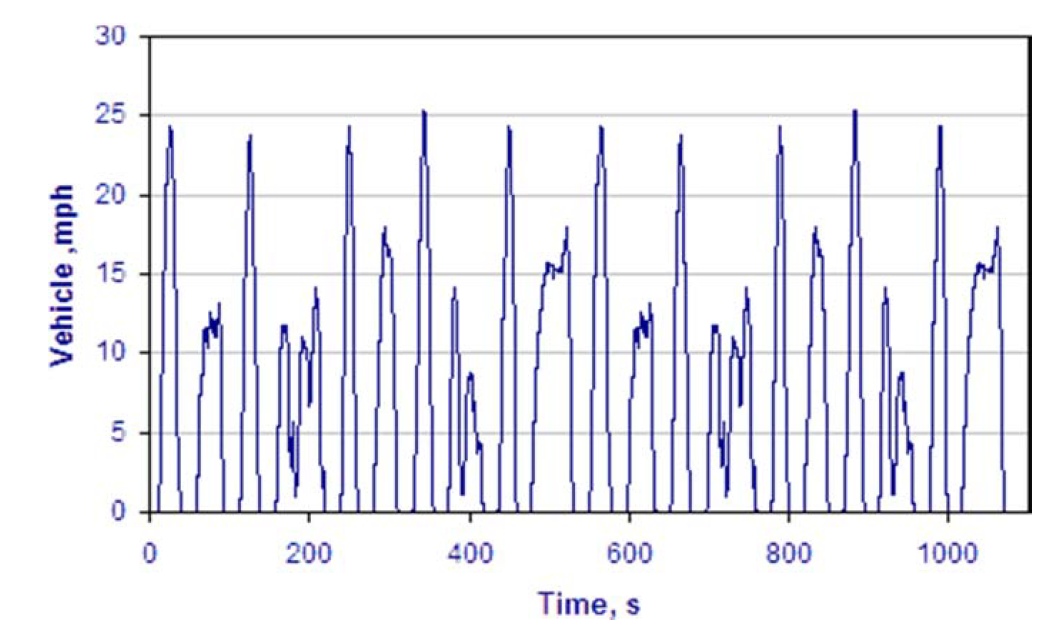
2. Manhattan ciklus (városi)
3. Orange-megye ciklus (város-előváros vegyesen)
4. HD-UDDS ciklus
5. 65 mérföld/óra folyamatosan
6. HD-UDDS ciklus
7. Manhattan ciklus
8. Orange-megye ciklus
9. HD-UDDS ciklus
10. 65 mérföld/óra folyamatosan
A Manhattan ciklus 1089 másodpercig tart, a maximális sebesség 25,4 mérföld/óra (40,8 km/h), az átlagsebesség 6,8 mérföld/óra (10,94 km/h):
A Narancs-megye ciklus 1909 másodpercig tart, a maximális sebesség 41 mérföld/óra (65,98 km/h), az átlagsebesség 12 mérföld/óra (19,31 km/h):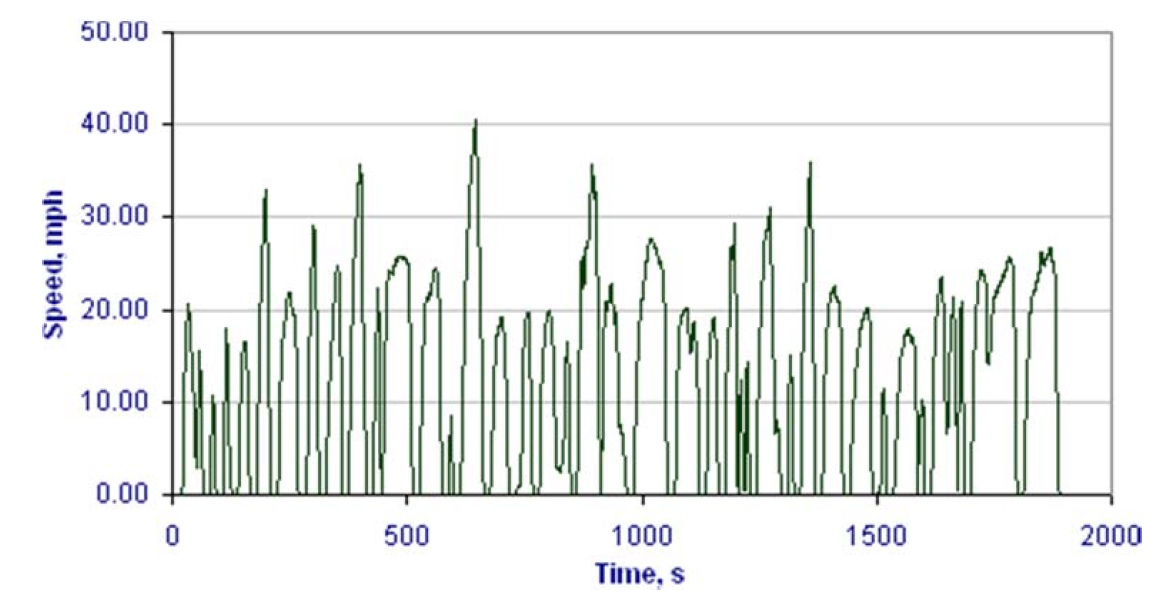
A HD-UDDS ciklus 1060 másodpercig tart, a maximális sebesség 58 mérföld/óra (93,34 km/h), az átlagsebesség 6,8 mérföld/óra (30,35 km/h):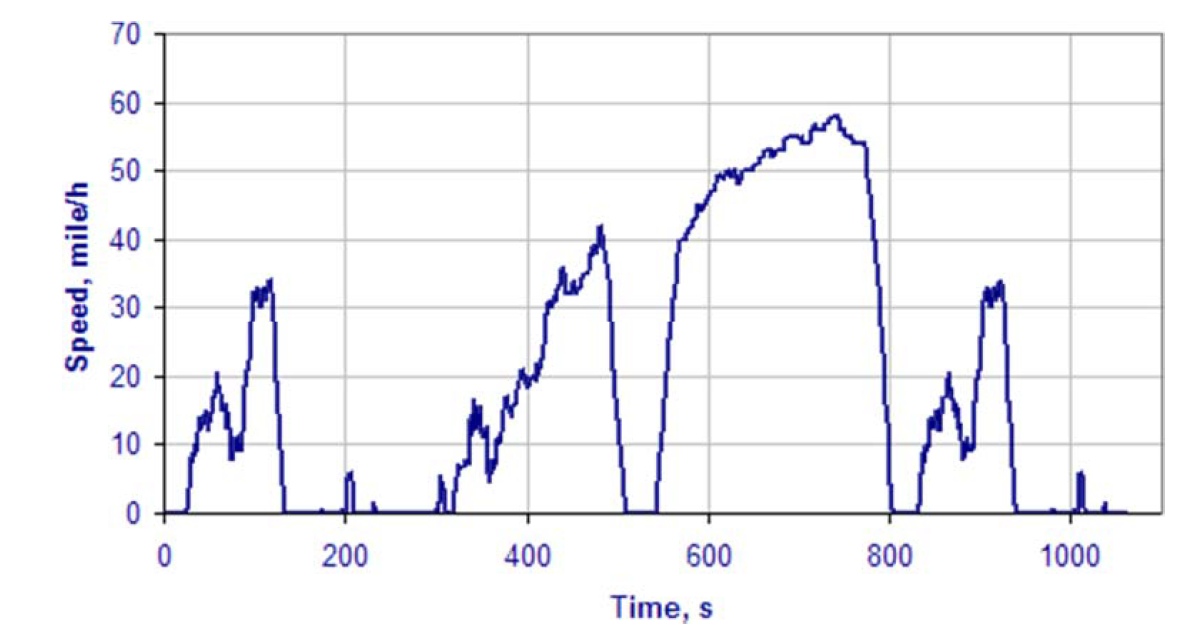
A teszt akkor ér véget, ha a busz már nem tudja folyamatosan tartani a 65 mérföld/órát vagy a teszt közben elérte a gyártó által megadott minimális töltöttség értékét az akkumulátora. Az újratöltés során mérik a töltő által felvett energiát (AC energia) és közvetlenül az akkumulátorokba jutó energiát (DC energia). A régebbi tesztekben ez még nem volt szétválasztva, egy értéket adtak meg.
Európai szemmel városi buszok számára érthetetlenül nagy sebességek is vannak ezekben a tesztekben, ezzel az itteni felhasználásra az egyes járművek és hajtásláncok energiafogyasztása nem is releváns. Inkább az egyes műszaki megoldások közti különbségek szemléltetése a célunk, ha már Európán belül nincs ilyen publikus adatbázis. Illetve kár, hogy Európában nincs hasonló átláthatóság, publikus és összehasonlítható mért adatoknak is híjján vannak az üzemeltetők. Az adópénzekből méregdrágán lefutó ilyen-olyan pilot projektek tapasztalatai, összefoglaló jelentéseinek a mélysége és komolysága (évek múltán kiderül a virágnyelven, polkorrekten leírtak ellenkezője) az amerikai teszt adatbázishoz képest megmosolyogtató.
Elektromos szóló buszok összehasonlítása:
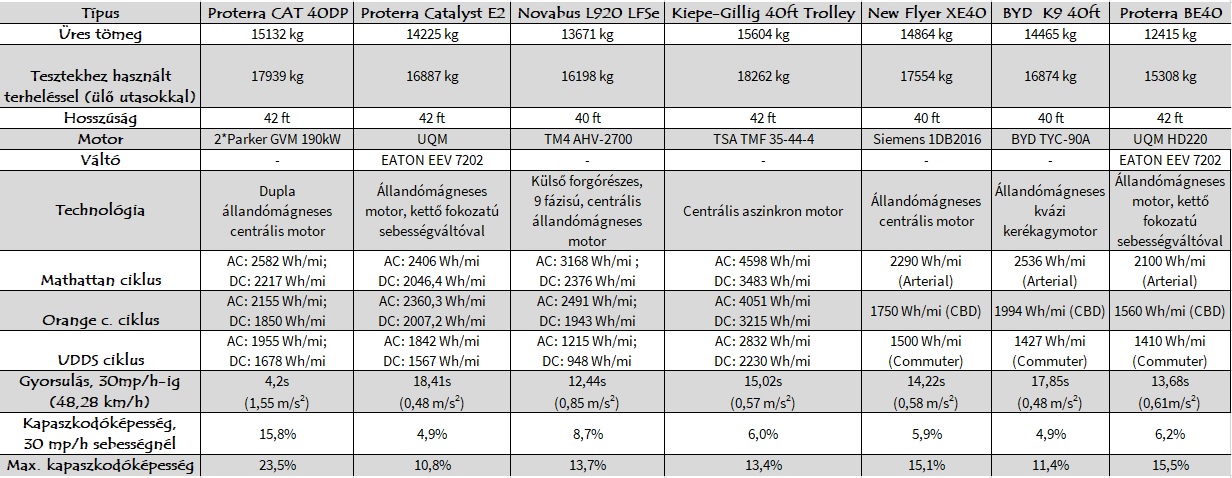
A kapott gyorsulási és kapaszkodóképességi adatokat nem csak a hajtáslánc, hanem az akkumulátorok fajtája, terhelhetősége is meghatározza. Erre jó példa az azonos hajtást használó kétféle Proterra busz (BE40 és Cat E2) közti különbség.
Az új-, és a régi mérési ciklusokkal mért fogyasztási adatokat nem jó ötlet összehasonlítani. Illetve még egy dolog, ha átszámoljuk kWh/km-be a mért adatokat, az elcsodálkozás után arra azért érdemes figyelni, hogy Amerikában az LE felépítés a megszokott, így a hajtott portál futómű elmaradása kisebb mechanikai veszteségeket jelent.
Azt látjuk, hogy a nagy módosítást használó kerékagymotoros hajtás nem különösebben hatékony, még állandó mágneses motorokkal sem és a kapaszkodóképessége sem tűnik ki, ahogy fentebb is pedzegettük. Viszont az a sok különféle műszaki megoldás, amin végigmentünk az első résztől fogva az mégis csak hatott. A táblázat közepén lévő 480 kilós, 160 kW-os aszinkron motort használó trolibusz csúnyán alulmaradt fogyasztás tekintetében, mindennel szemben. Ezért érdemes elgondolkozni, hogy az egyre terjedő akkumulátoros trolibuszokat érdemes-e szokásjog alapján specifikálni, esetleg nem lenne időszerű más megoldások után nézni?
 BYD K11M csuklós busz, térdeplő funkcióval (Kép: Altoona-teszt)
BYD K11M csuklós busz, térdeplő funkcióval (Kép: Altoona-teszt)
Csuklós buszok terén szerényebb a felhozatal, fogyasztás terén itt az aszinkron motoros kerékagymotor marad alul az állandó mágneses rokonával szemben: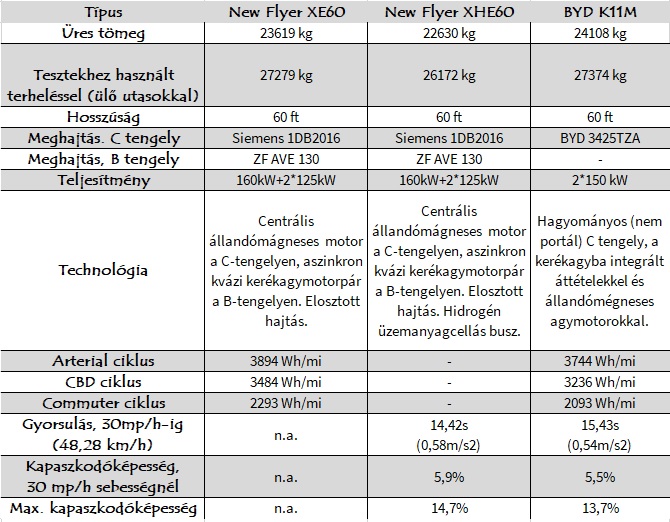
Az elosztott hajtásrendszer adta lehetőség csak minimálisan látszik a jobb gyorsulással és a minimálisan jobb kapaszkodóképességgel. Egyrészt itt a teljesítményelosztás felborul. Az aszinkron kerékagymotor tartós terhelhetősége sokkal rosszabb a centrális motornál, tehát tartós üzemben inkább tolócsuklós lesz a busz. Másrészt a nagy mechanikai módosítás és az aszinkron motor gyenge hatásfoka kiütközik az állandó mágneses motorral szemben a fogyasztási adatokban. Érdemes megnézni, hogy ugyanez a centrális Siemens hajtás (egyébként a BYD-nél nehezebb) szóló New Flyerben az ingázó üzemet kivéve még hatékonyabb a BYD kerékagymotoros megoldásánál, a BYD K11-től könnyebb New Flyer csuklós a kerékagymotoros aszinkron motorral kiegészülve már többet fogyaszt.
De egy kis kitérő után vissza a váltókhoz! Ha az akkumulátor nem korlátozza a motort, akkor látható, hogy kis motorral is jó fogyasztási, gyorsulási és kapaszkodóképességi adatokat lehet elérni, főleg városi üzemben. Nagy távolságra, nagy sebességgel a legkisebb mechanikus módosítást igénylő külső forgórészes motorral kaptuk a legjobb fogyasztást, ez nem véletlen. A váltóművek hatásfokát sem lehet egyetlen értékkel leírni, ez is függ a terheléstől és a fordulatszámtól is:
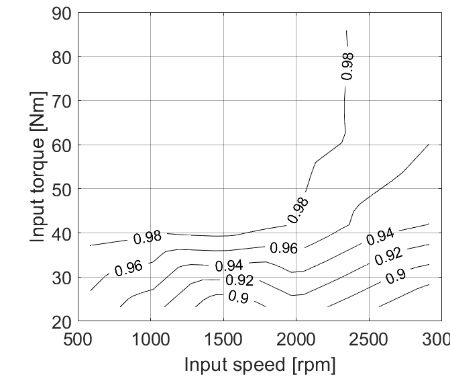 Egy személyautó váltójának a hatásfok térképe. Nagy fordulatszámokon romlik a hatásfok.
Egy személyautó váltójának a hatásfok térképe. Nagy fordulatszámokon romlik a hatásfok.
Mi a helyzet a tömeggel? A mérésekben szereplő külső forgórészes állandó mágneses motor (TM4) tömege 340 kg, ezzel szemben a Proterra buszokban használt UQM motor csak 85 kg, és ehhez jön a váltó 92 kilója, ami 177 kg összesen. Egyfokozatú áttétel esetén kb. 20 kilogrammal lehet számolni, a kétfokozatú váltó kb. 92 kg, a hasonló gyártmányú és működésű négyfokozatú várhatóan 104 kg, a hatfokozatú pedig 177 kg lesz. A buszokban használt szokásos automata váltóknál ezek jóval kisebb értékek, hol a turpisság? Turpisság nincs, a dízelmotoroknak nincs nyomatéka az alapjárat közelében, ezért az induláskor szükség van egy nehéz hidromechanikus megoldásra. Az elektromos motorok nyomatéka viszont nulla fordulatszámtól rendelkezésre áll, ezért kisebbek, könnyebbek lehetnek a váltók. Tehát a váltók újbóli használatával vállaljuk a rosszabb erőátviteli hatásfokot, cserébe kisebb helyigényt, könnyebb hajtóművet és több üzemállapotban is hatékonyabb hajtást kaphatunk.
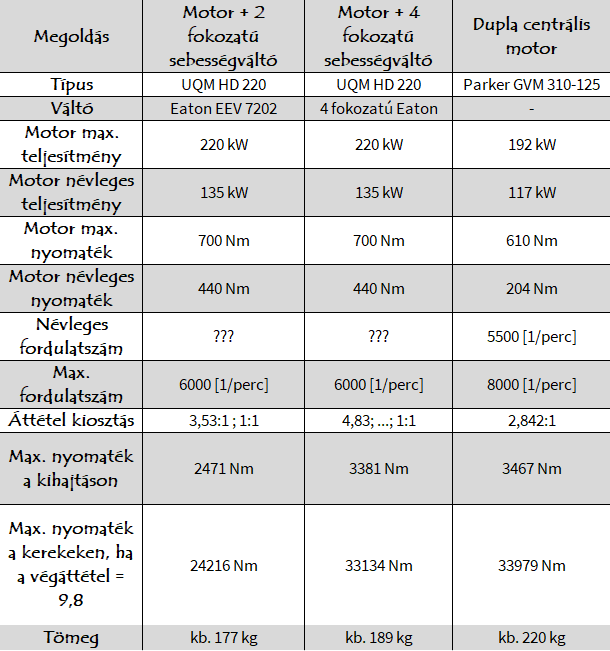
A Proterra buszba beépített UQM-Eaton négyfokozatú váltós megoldás az első tesztek szerint 30 mérföld/óráig 9,7 másodperces gyorsulást, 24%-os legnagyobb kapaszkodóképességet és nagyobb végsebességet ígér. Tömegben 189 kiló körül járunk. A Proterra által használt másik erőátviteli (DuoPower) megoldás, a váltó nélküli dupla állandómágneses motor (Parker GVM-sorozat) dinamikában még jobb, egy motor tömege 100 kg. A dupla motor összegző hajtómű nélkül tehát csak valamivel nehezebb.
Létezik az UQM-nek 250kW-os motorja is, ami szintén 81 kilós, de arról még nem találtunk ilyen részletes tesztet.

Miért veséztük ki ezt ennyire? A Volvo is valami hasonló megoldást használ az elektromos csuklósánál, de ott a dupla motort kombinálták a sebességváltóval és egyelőre nincs ennyi adatunk róla. Az amerikaiak nyíltsága a kínai elektromos jármű igény miatt érthető, őrületesen jó piac ez az amerikai cégeknek. Látszik, hogy az állandó mágneses motorokban is van még tartalék.
Indultunk 420-480 kg környékéről a szóló buszokban használt aszinkron motorokkal, az állandó mágneses motorokkal le tudtunk menni 350 kg környékére, folyadékhűtéssel pedig akár 250-300 kg környékére is. Megfelelő áttételekkel vagy sebességváltókkal ez még lejjebb szorítható.
Első ránézésre a váltó elhagyása költség, gyárthatóság, karbantartás és hatékonyság oldaláról is egy jó lépés volt, na meg rutin, ha már egyszer elektromos hajtásról van szó. Az akkumulátorok nehézkes fejlődése és továbbra is brutális tömege és helyigénye viszont újból a teljes hajtáslánc újragondolására késztette a mérnököket és a legújabb álláspont szerint még nem kell kitenni a bezárt táblát a váltógyárakra (sem).
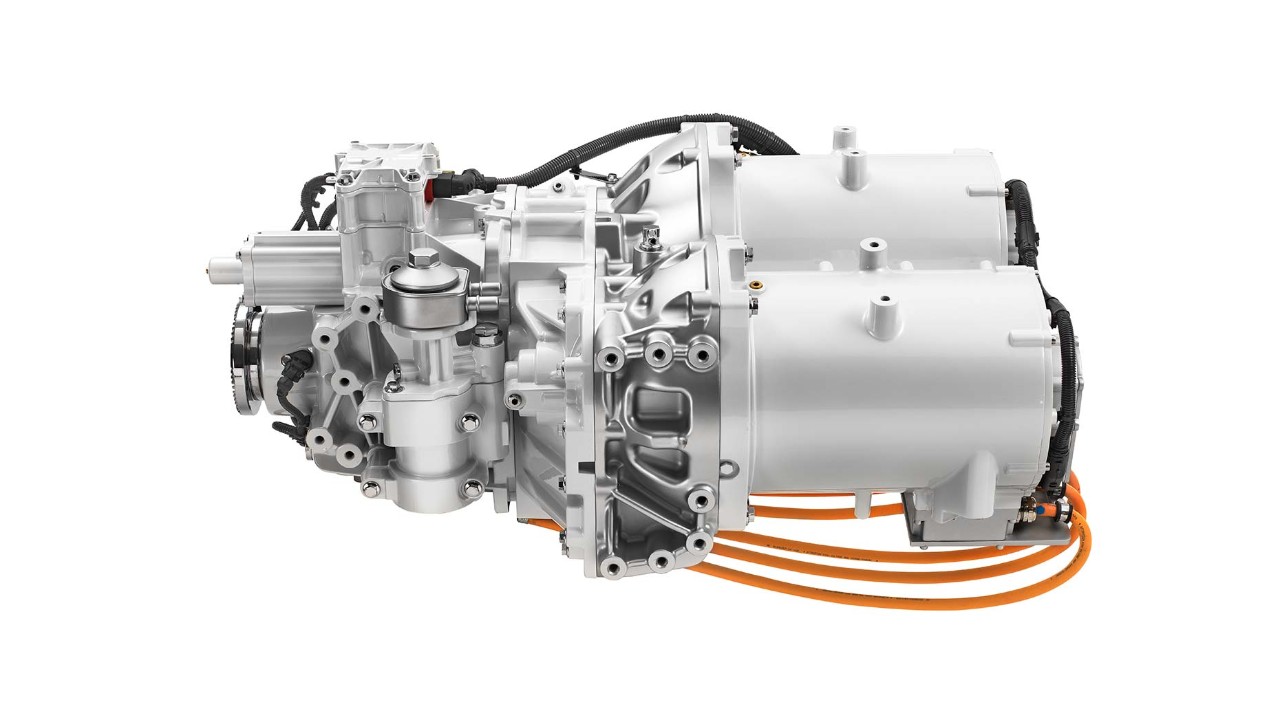
Integráltság
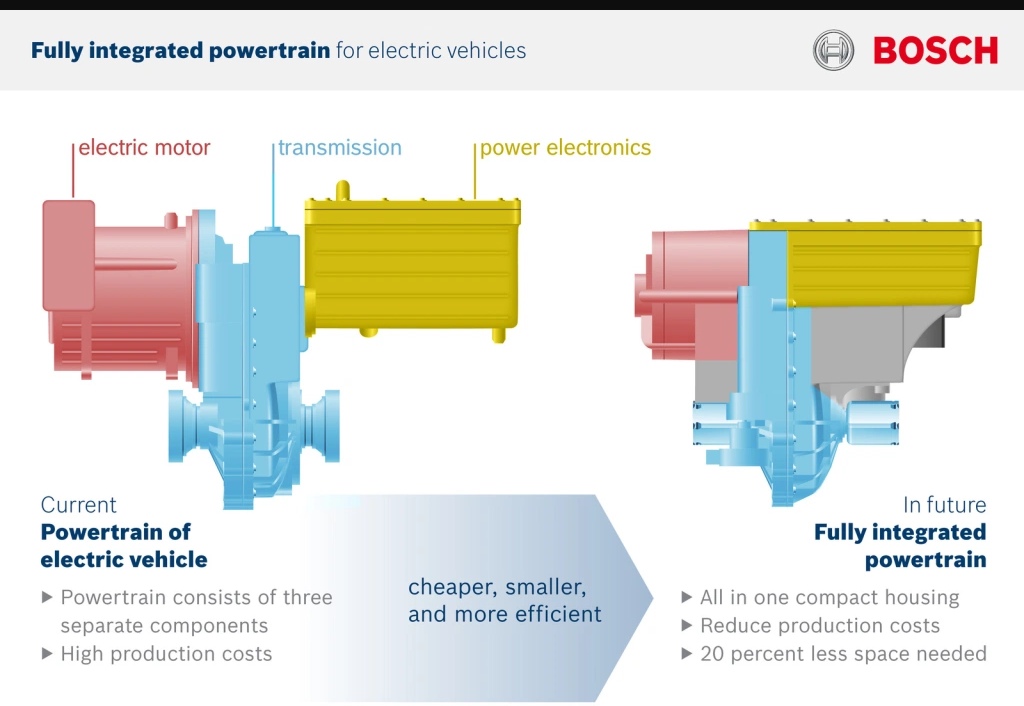 Hajtásegység a Bosch szerint. Ma már a jövőben élünk... (Kép: Bosch)
Hajtásegység a Bosch szerint. Ma már a jövőben élünk... (Kép: Bosch)
Újabban a személyautókban egy hajtásegységbe integrálják a villanymotort, az ezt tápláló invertert és az áttételeket is. Ezzel tömeget, helyet spórolnak, nem csak az egyszerűbb felfogatás és a könnyebb tokozás miatt, hanem például az inverter és a motor közötti erősáramú kábelezés is egyszerűsödik, ahogy az egész egység hűtése is jóval egyszerűbb, mint három különálló egységé. Ez a megoldás nagyobb járművekben a valódi kerékagymotoroknál megfigyelhető, ott az inverter kerülhet be a motor állórészébe.
 A Volkswagen szerint egy sporttáskában is elfér az ID.3 motorja (Kép: VW)
A Volkswagen szerint egy sporttáskában is elfér az ID.3 motorja (Kép: VW)
Haszonjárműveknél a motor és az áttétel egybeépítése itt-ott már megfigyelhető, például a ZF CeTrax motorja és ránézésre az MAN megoldása is ilyen. Az inverter integrálása az egyszerű javíthatóság miatt egyelőre nem várható, de nem is kizárható a közeli jövőben.
Eddig azok a műszaki megoldások, amivel bármilyen motor, hajtáslánc mérete, tömege csökkenthető. Az látszik, hogy többféle irány van, hogy melyik fog befutni, az a jövő zenéje. A sebességváltós megoldások tömegben meggyőzők, a buszok többféle felhasználási területe (városi-elővárosi) is megmarad, jó hatékonysággal. Az elosztott hajtásrendszerek esetén a korlátozott végsebesség szűkítheti a felhasználási területeket, viszont tapadásban és valószínűleg hatékonyságban is jó mutatókkal bír majd. A kerékagymotoros megoldások helyigénye verhetetlen. sík terepre és egyetlen felhasználási körre ideálisak, viszont hatékonyabb motorokat érdemelnének. Ez utóbbi két megoldás is elérhet nagyobb végsebességeket eltérő áttételezéssel, de akkor a városi hatásfokuk és a dinamikájuk is romlik.
A következő részben megnézzük hogyan lehet összeépíteni egy elektromos buszt, milyen beszállítók kínálatából lehet válogatni és milyen téren lenne lehetőség helyi vállalkozások számára.
Felhasznált és ajánlott irodalom:
- Gábor Péter: Villamos vasutak I-II-III.
ZF: Dr. Frank-Detlef Speck: Electrification in Buses
ZF: Product Overview 2019.09
ZF 00440000d5 prezentáció
https://motorbranschen.mrf.se/helelektriska-volvolastbilar-nu-ute-hos-kund/
https://www.danatm4.com/blog/5-benefits-multi-phase-motors-inverters/
[1] Homoki István - Az Ikarus-GVM trolibusz - Elektrotechnika 1989/11.
Kyoungseok Han, Yan Wang, Dimitar Filev, Edward Dai, Ilya Kolmanovsky, and Anouck Girard : Optimized Design of Multi-Speed Transmissions for Battery Electric Vehicles
Heikki Laitinen - Improving electric vehicle energy efficiency with two-speed gearbox
https://dieselnet.com/standards/cycles/bac.php
https://www.altoonabustest.psu.edu/assets/docs/bus%20docs/updated%20procedures/Energy-Economy1.pdf
EATON - Multi-speed transmission for commercial delivery medium duty PEDVs, Final Report




